CAN总线传输原理及技术发展综述 - 从BOSCH到ISO的演进
版权申诉
117 浏览量
更新于2024-02-21
1
收藏 4.31MB PPTX 举报
CAN总线交流协议是一种广泛用于汽车和工业领域的通信网络,最初由德国BOSCH公司提出。1991年,PHILIPS Semiconductors制定并发布了CAN技术规范版,其中包括了A和B两部分。1993年,国际标准化组织ISO颁布了道路交通运输工具数据信息交换高速通信局域网(CAN)国际标准ISO11898。美国汽车工程学会(SAE)2000年提出的J1939成为货车和客车中控制器局域网的通用标准。
CAN总线的发展和标准主要可以追溯到20世纪80年代末,当时汽车工业开始对通信和控制网络有了更高的需求。CAN总线的标准帧和扩展帧两种格式都是由帧起始SOF(Start of Frame)、仲裁域(Arbitration Field)、控制域(Control Field)、数据域组成。这些格式在实际应用中非常重要,因为它们能够确保数据在网络中的可靠传输和正确解析。
标准帧是CAN总线中用于传输最基本数据的格式,它包括11位标识符和6位控制域。而扩展帧则是在标准帧基础上增加了18位标识符和2位控制域,用于传输更复杂的数据。这两种格式在实际应用中的选择取决于数据传输的复杂程度和网络的实际需求。
CAN总线的传输原理是基于网络上各个节点之间的通信和数据交换。网络中的每个节点都可以发送和接收数据,而总线结构使得节点之间可以通过共享总线来实现数据的传输。这种基于总线结构的通信方式使得CAN总线在实际应用中表现出了较高的稳定性和可靠性。
除此之外,CAN总线在传输原理的实现中还涉及到了仲裁机制和错误检测。仲裁机制是指在多个节点同时发送数据时,通过总线上的ID比较来确定哪个节点有权利继续发送数据。而错误检测则涉及到了网络中对数据传输过程中可能出现的误码和干扰进行检测和纠正的技术。
总的来说,CAN总线的传输原理是建立在其标准帧和扩展帧格式的基础上,通过总线结构和节点之间的通信实现数据的可靠传输和正确解析。同时,仲裁机制和错误检测也为CAN总线的稳定性和可靠性提供了重要的保障。这些特点使得CAN总线在汽车和工业领域得到了广泛的应用和认可。
第 2 章 CAN 总线传输原理
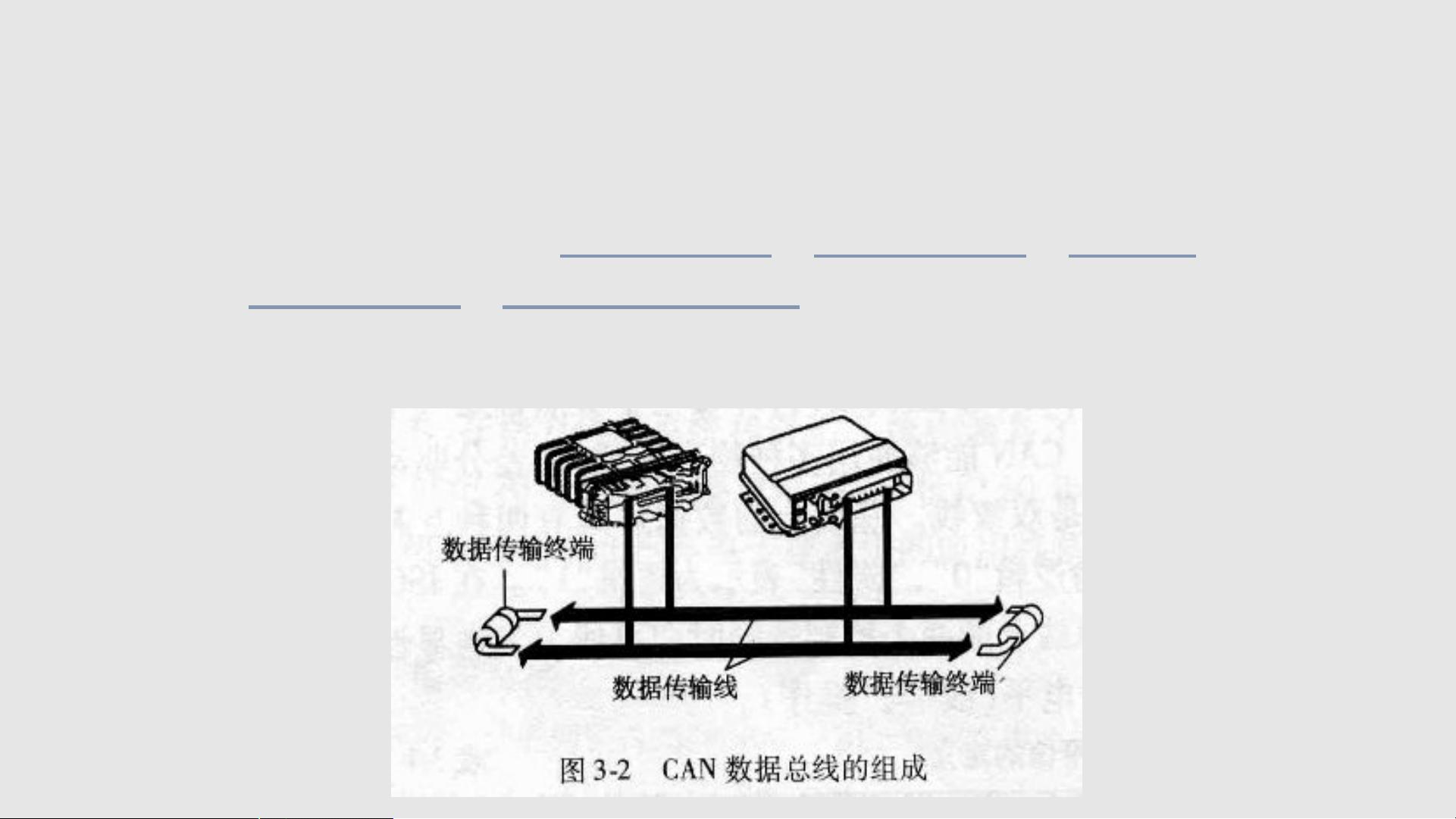
四、 CAN 总线的组成
CAN 数据总线由一个控制器、一个收发器、两个数
据传输终端及两条数据传输线组成。
除数据传输线外,其他元件都置于控制单元内部。
第 8 页 / 共 41 页
剩余40页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-23 上传
2021-10-06 上传
2021-10-07 上传
2021-10-06 上传
2021-10-02 上传
2021-10-08 上传

加油学习加油进步
- 粉丝: 1405
- 资源: 52万+
 我的内容管理
展开
我的内容管理
展开







