基于陀螺仪和加速度的自平衡小车控制系统设计详解
自平衡小车详解_陀螺仪和加速度详细介绍
本文主要介绍了自平衡小车的详细解释,包括陀螺仪和加速度的详细介绍。自平衡小车是指可以保持自身平衡的车辆,它可以在不稳定的路面上行驶,具有很高的稳定性和灵活性。
自平衡小车的控制系统主要由三个部分组成:直立控制、速度控制和方向控制。其中,直立控制是指车辆保持垂直状态的控制,速度控制是指车辆的速度控制,方向控制是指车辆的方向控制。
在自平衡小车的设计中,需要考虑到车辆的稳定性、灵活性和安全性等多方面因素。为了实现自平衡小车的设计,需要使用到许多技术,如陀螺仪、加速度计、电机驱动等。
陀螺仪是一种测量车辆倾角的仪器,能够提供车辆的倾角信息。加速度计是一种测量车辆加速度的仪器,能够提供车辆的加速度信息。电机驱动是指车辆的电机驱动系统,能够提供车辆的动力。
在本文中,我们将详细介绍自平衡小车的设计和实现过程,包括电路设计、机械设计、软件编写和调试等方面的内容。
电路设计是指自平衡小车的电路设计,包括整体电路框图、DSC介绍与单片机最小系统、倾角传感器电路、电机驱动电路、速度传感器和电磁线检测电路等。
机械设计是指自平衡小车的机械设计,包括车模简化改装、传感器安装和注意事项等。
软件编写和调试是指自平衡小车的软件编写和调试,包括软件功能与框架、DSC的资源配置、主要算法及其实现、程序调试与参数整定和现场运行测试等。
本文提供了一个完整的自平衡小车设计方案,涵盖了电路设计、机械设计和软件编写和调试等方面的内容,为读者提供了一个详细的自平衡小车设计指南。
在本文的结尾,我们还提供了一个附录,包括车模直立行走的参考设计方案和车模测试运行视频下载地址等信息,为读者提供了更多的参考资源。
本文提供了一个详细的自平衡小车设计方案,涵盖了电路设计、机械设计和软件编写和调试等方面的内容,为读者提供了一个完整的自平衡小车设计指南。
9
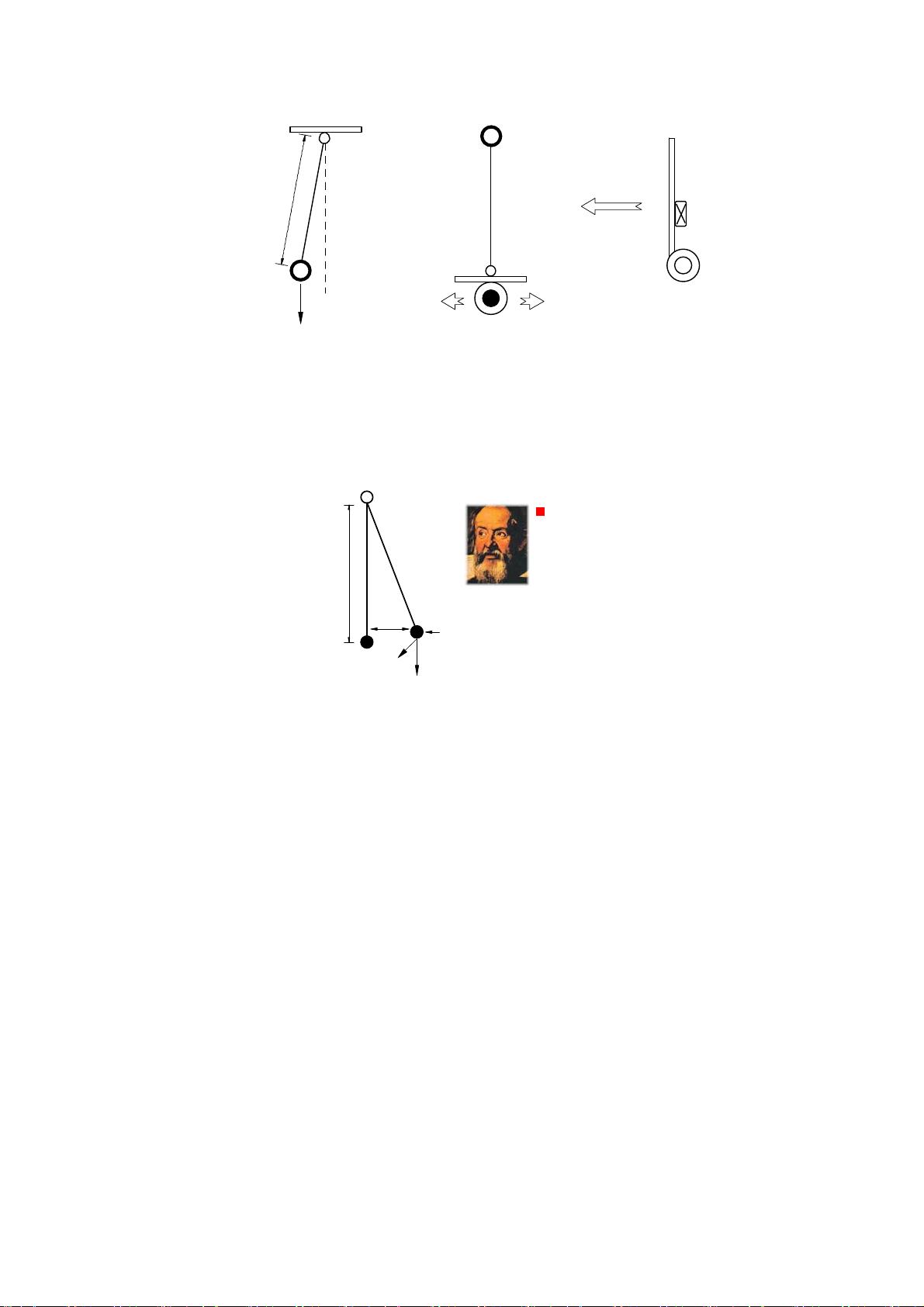
图 2.5 车模可以简化成倒立的单摆
普通的单摆受力分析如图 2.6 所示。
图 2.6 普通的单摆受力分析
当物体离开垂直的平衡位置之后,便会受到重力与悬线的作用合力,驱动重物回复
平衡位置。这个力称之为回复力,其大小为
sinFmg mg
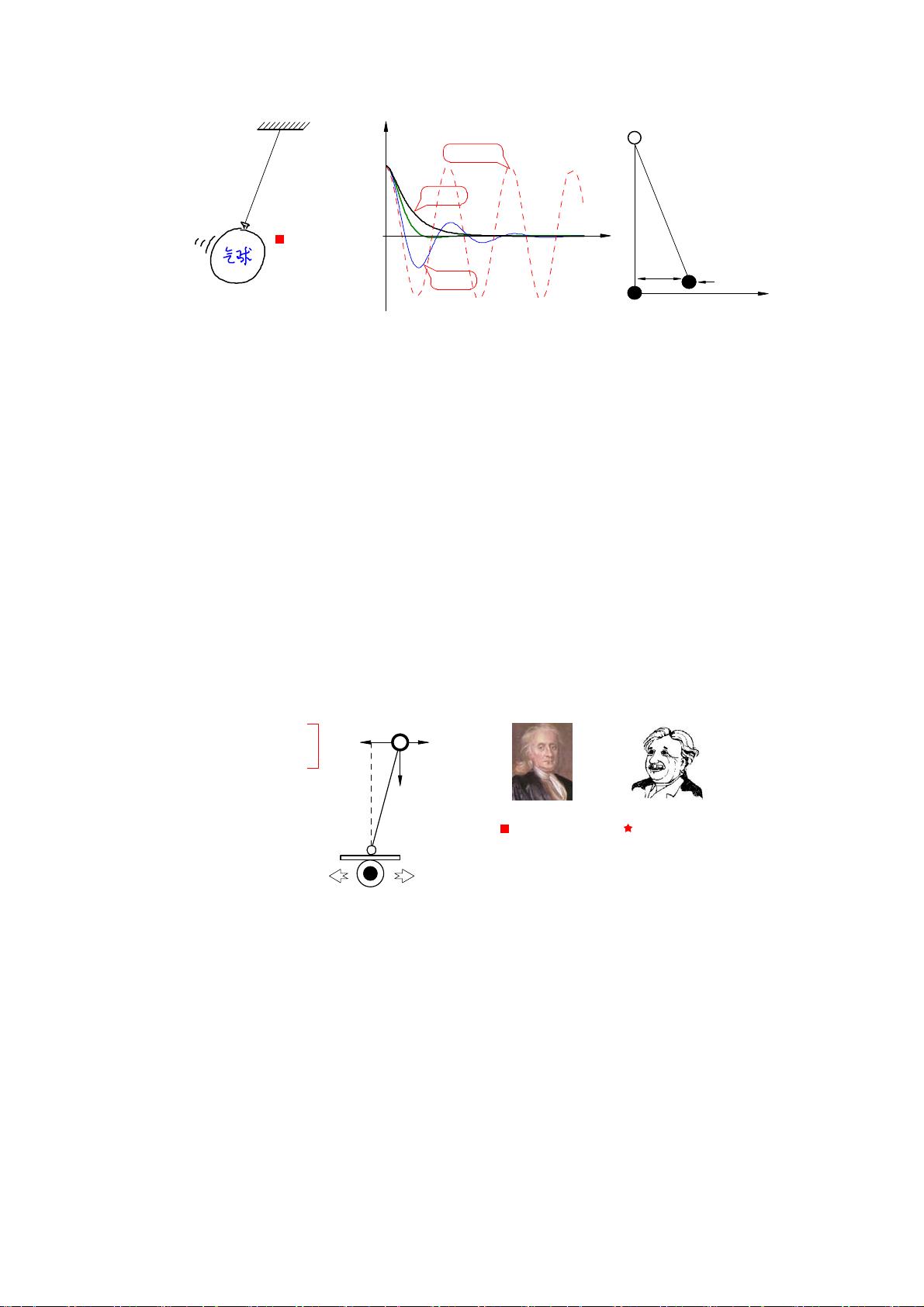
在此回复力作用下,单摆便进行周期运动。在空气中运动的单摆,由于受到空气的
阻尼力,单摆最终会停止在垂直平衡位置。空气的阻尼力与单摆运行速度成正比,方向
相反。阻尼力越大,单摆越会尽快在垂直位置稳定下来。图 2.7 显示出不同阻尼系数下,
单摆的运动曲线。
m
l
mg
θ
a
m
l
车模
简化
底部可以
运动的倒
立单摆
单摆模型
θ
l
sinθ
F=mg
l
质心
m
mgsinθ
伽利略
据说伽利略通
过观察吊灯的
摆动发现了单
摆运动的等时
性。
剩余48页未读,继续阅读
820 浏览量
点击了解资源详情
500 浏览量
2022-09-24 上传
214 浏览量
1552 浏览量

lesha520
- 粉丝: 4
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- matlab代码sqrt-M_matrix:使用类似Matlab的脚本语言与您的Fortran程序进行交互
- stellaris-wandering-leviathans:Stellaris的流浪Leviathans mod,可通过命令进行自定义
- 反应罐控制程序200.rar
- rgb 和 yuv_nv12 数据相互转换
- mints-sensordata-to-postgres-后端:将校准后的传感器数据读入postgres
- 维控 Plc加密 软件.rar
- northernrocketrywebsite
- estudo_angular_4_native_script_rails_api:Angular 4 + NativeScript e Api em Rails 5的列表列表
- matlab代码sqrt-UTM_Heat:用于数字实现统一变换方法(UTM)的代码,以多层求解热方程
- Titanic
- ios开发438个实例源码大全.rar
- 投资分析
- 维控LEVISTUDIO人机界面画面制作软件.zip
- WACOM数位板BAMBOO CTH-470驱动程序 官方最新版
- scss-storybook-quickstarter
- matlab代码sqrt-pnla:多项式数值线性代数
