DS&RS系列伺服驱动器通讯协议手册V8解读
版权申诉
"DS&RS系列伺服通讯手册V8.pdf" 是一本关于DS和RS系列低压伺服驱动器的通讯手册,详细介绍了这些驱动器如何通过Modbus和CAN总线进行控制。手册涵盖单轴和双轴驱动器的不同型号,如DS10240X、DS10270X、RS10240X、RS10270X、DS20240X、DS20270X、RS20240X和RS20270X,以及它们对应的通讯端口、接口和协议。
**第一章产品概况**
- 该章节简要概述了DS/RS系列伺服驱动器的基本特点,强调它们支持的通讯方式,如CANopen和Modbus协议。
- 通讯端口包括CN1/CN2(用于单轴驱动器)和CN3/CN4(用于双轴驱动器),分别支持CAN和RS485通讯。
- 注意事项提醒用户在操作时遵循安全规定,如参数修改需谨慎处理。
- 参数修改部分详述了如何通过通讯、手持调试板对驱动器进行参数设定,针对单轴和双轴驱动器给出了不同方法。
**第二章Modbus协议**
- 这一章深入介绍了Modbus协议的接线、关键参数,以及如何使用Modbus RTU和ASCII进行通讯。
- Modbus RTU和ASCII的单轴及双轴驱动器示例提供了实际应用的参考。
- Modbus运动控制配置包含速度模式指令,适用于单轴和双轴驱动器,同时介绍了双轴驱动器特有的协议,如双读双写和差速模式指令。
- 上位机软件SyntronTS的使用指南,包括软件的接线、参数编辑、波形检测、D参数监控等功能,帮助用户更好地操控伺服驱动器。
**第三章CANopen**
- 本章介绍了CANopen协议的基础知识,这是一种广泛应用的工业通讯协议,尤其适合分布式控制系统。
- 关键参数部分详细列出单轴和双轴驱动器在CANopen通讯下的关键配置项。
- CANopen对象字典包含重要的控制字、状态字等,这些都是实现CANopen通讯的关键数据结构。
这本手册全面覆盖了DS&RS系列伺服驱动器的通讯原理和操作方法,为用户提供了详细的指导,无论是系统集成还是设备调试,都能从中获取必要的信息。用户应当依据手册进行操作,确保正确安全地使用伺服驱动器。
Modbus 协议
- 6 -
第二章 Modbus 协议
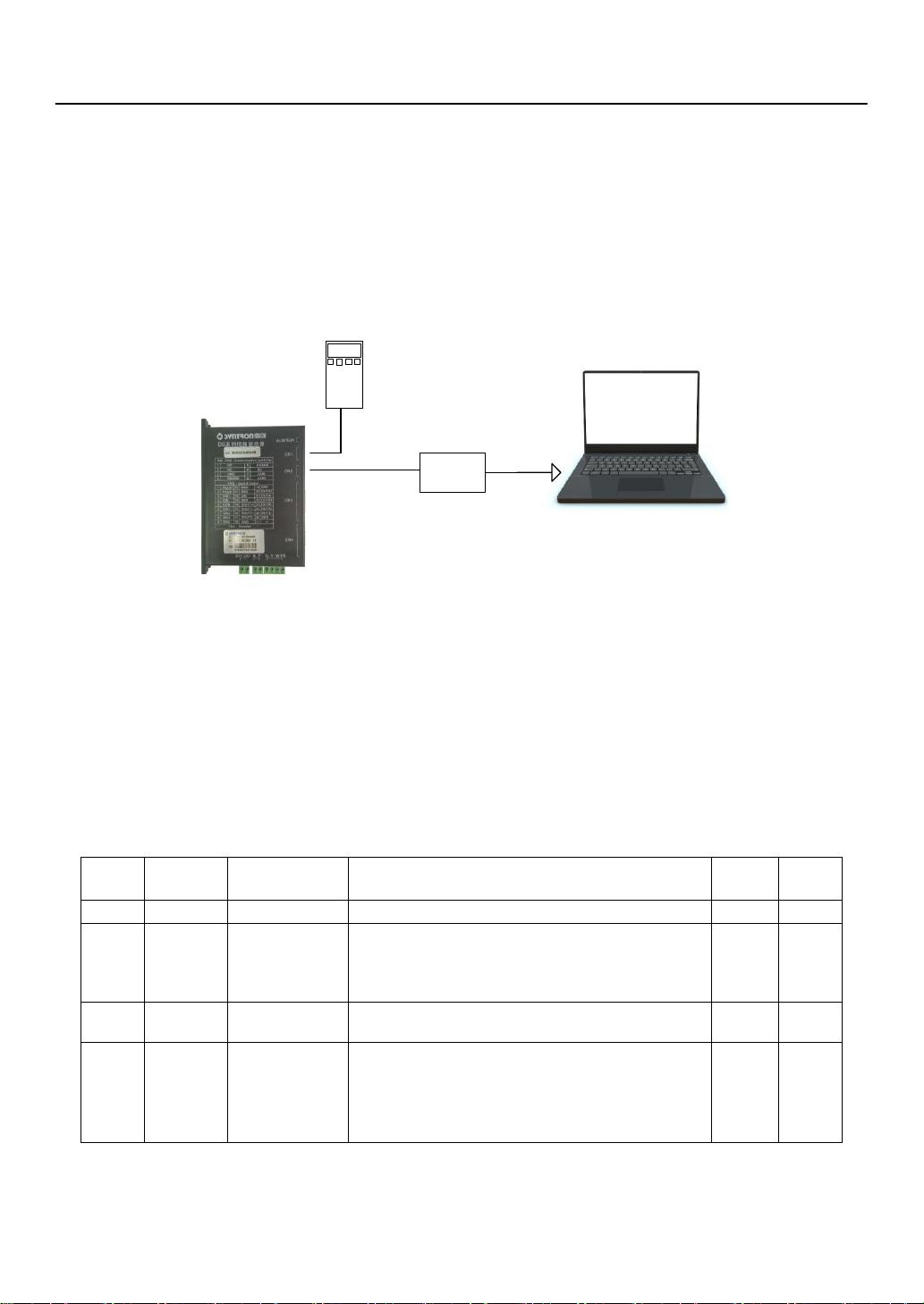
2.1 接线说明
用户可通过 RS232 / 485 读写驱动器参数,也可以通过总线使用驱动器的速度模式
进行运动控制,以下为常见接线,以单轴驱动器为例:
图 2-1 单轴驱动器连接 PC
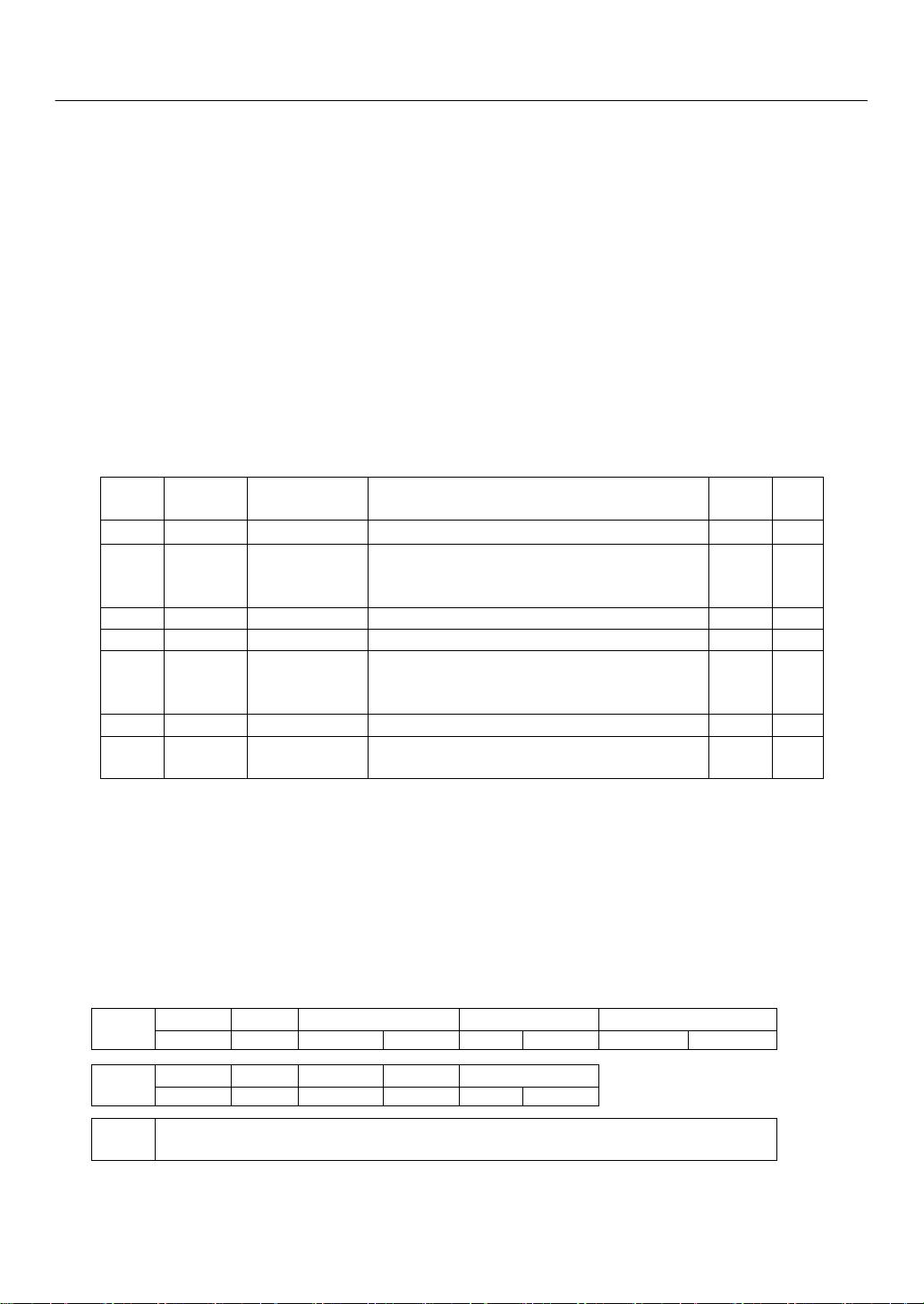
2.2 关键参数(单轴)
用户用通讯的方式控制驱动器时,必须确认以下驱动器参数。驱动器默认 Modbus
地址为 1,波特率为 115200bps,ModBus_RTU 模式(协议采用 8 个数据位、1 个停止
位、无奇偶校验), 用户可根据需求设置。。
功能参数(Fn00~Fn17F)对应的寄存器地址为:0x0000~0x017F;
状态参数(Dn00~Dn2F)对应的寄存器地址为:0x1000~0x102F。
地址和数据均是高字节在前。
参数
编号
Modbus
地址
参数
名称
参数内容
设定
范围
出厂
设定
Fn3A
0x003A
Modbus 地址
0 为广播地址,1~127 为站址编号
0~127
1
Fn3C
0x003C
Modbus
通讯波特率
0:2400bps; 1:9600bps; 2:38400bps;
3:57600bps; 4:115200bps;
5:192000bps; 6:512000bps;
0~6
4
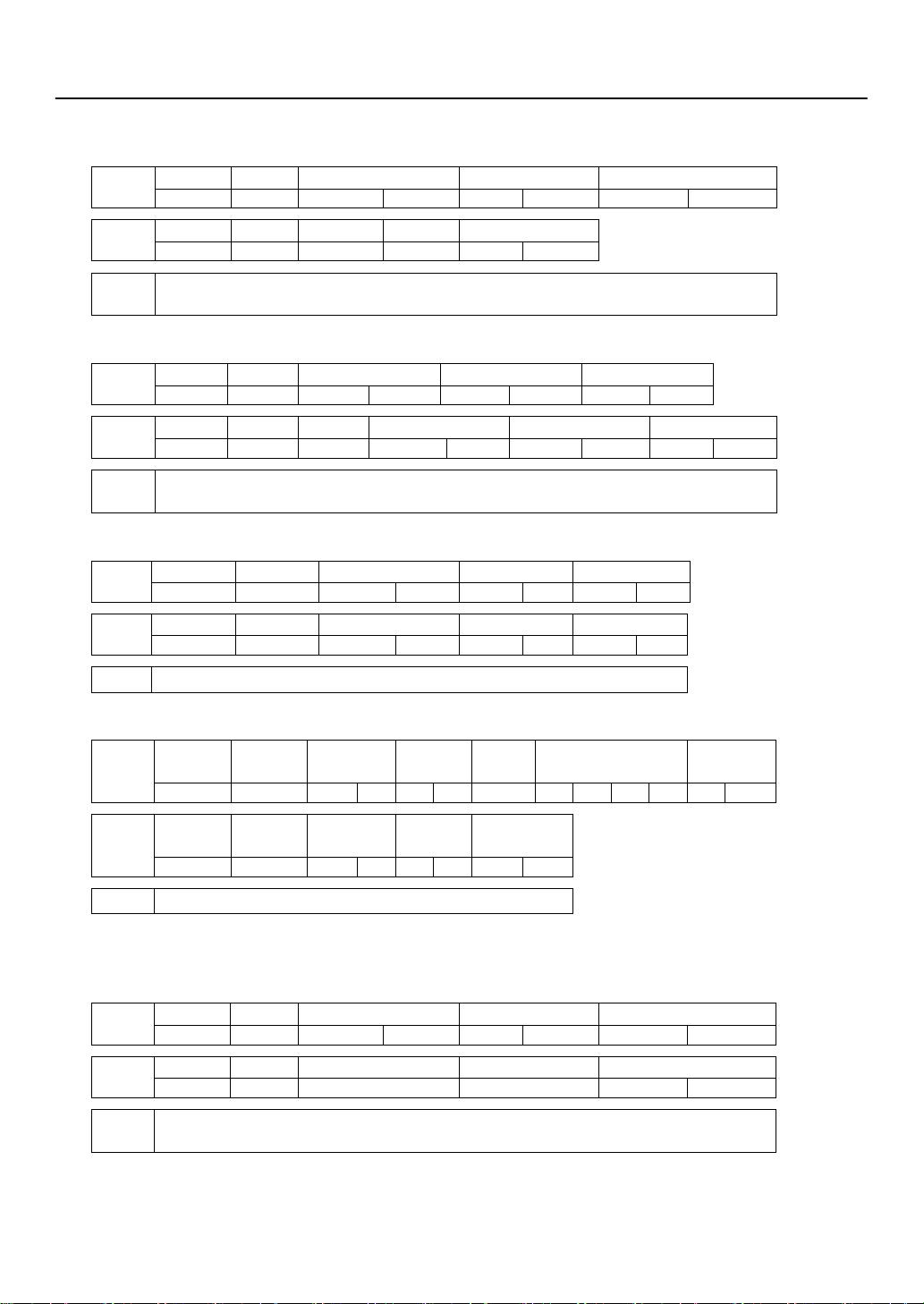
Fn3D
0x003D
Modbus
模式选择
101:ModbusRTU; 102:ModbusAS
-
101
Fn99
0x0099
通讯参数模式
1:指令在 RAM 中运行; 0:指令写入 Flash 保存
注:注:Flash 写入寿命有限,如该参数经常更改且
无需保存,请置 Fn99 为 1,否则会写坏驱动器
FLASH
0~1
0
CN1
CN2
调试面板
上位机
USB-485转换器
RS485 USB
剩余55页未读,继续阅读
2023-08-20 上传
2024-01-29 上传
2023-06-28 上传
2023-09-20 上传
2023-06-02 上传
2024-09-27 上传
2023-06-03 上传
2024-01-09 上传

奔跑的Lunzi
- 粉丝: 350
- 资源: 363
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
