数字PID控制器设计与调速实验分析 - MATLAB仿真分析及性能影响评估
版权申诉
198 浏览量
更新于2024-02-28
1
收藏 281KB DOC 举报
一、实验目的与内容
本实验旨在分析晶闸管直流单闭环调速系统中PID控制器的设计及参数对系统性能的影响。具体实验目的包括:理解直流单闭环调速系统的数学模型和工作原理、掌握PID控制器参数对系统性能的影响、熟练运用MATLAB/Simulink软件对系统建模及参数设置、掌握计算机控制仿真结果的分析方法。实验工具为MATLAB软件。
二、实验步骤
1. 模拟PID控制作用分析
- 比例控制作用分析:
采用MATLAB软件对系统的比例控制作用进行分析,通过设置参数Td = 0, Ti = 0,以及不同的Kp值(1~5),观察系统的阶跃响应曲线。根据实验结果显示,比例系数越大,系统的响应速度越快,稳态误差越小,但会增加超调量。
- 积分控制作用分析:
保持Kp = 1不变,通过调整Ti的数值(0.03~0.07),观察系统的阶跃响应。实验结果显示,积分系数对系统的响应速度和稳定性有显著影响,适当调整积分时间常数可减小系统超调量和稳态误差。
- 微分控制作用分析:
保持Kp = 1和Ti = 0不变,通过设置不同的Td值观察系统的阶跃响应曲线。微分控制作用对系统的稳定性和抑制振荡有一定作用,适当的微分时间常数能够减小系统的超调量和振荡现象。
3. 最佳PID参数设计
根据比例、积分和微分控制作用的分析结果,可以通过试验和调整得到最佳的PID控制器参数组合,以提高系统的响应速度、稳定性和准确性。
4. 性能评价与分析
通过对最佳PID参数组合下系统的阶跃响应曲线进行分析,评价系统的性能表现,如超调量、稳态误差、响应速度等。根据分析结果,结合实际应用需求,进一步优化PID控制器参数,以达到最佳的控制效果和性能表现。
总体而言,本实验通过对晶闸管直流单闭环调速系统的PID控制器设计与分析,深入探讨了参数调整对系统性能的影响,为掌握控制系统的调节与优化提供了实践基础和指导原则。
计控实验报告
Kp=0.01;
Ti=0.01;
Td=[12:36:84];
for i=1:length(Td)
Gc=tf(Kp*[Ti*Td(i) Ti 1],[Ti 0])
Gcc=feedback(G*Gc,0.01178) ;
step(Gcc),hold on
end
legend('Td=12','Td=48','Td=84');
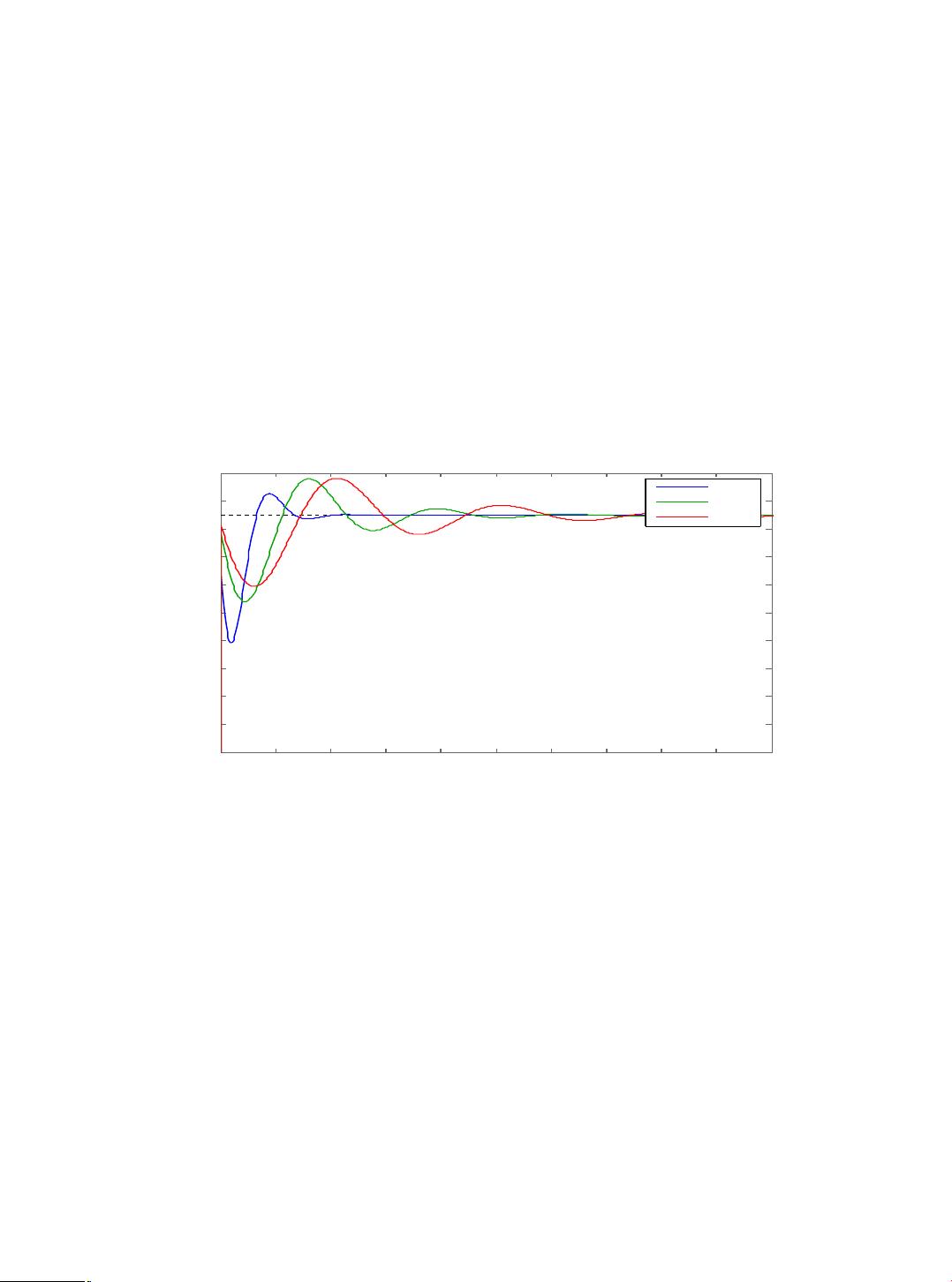
2) 仿真结果如图 4
3) 结果分析
又系统单位阶跃响应曲线可知,在微分作用下,微分系数越小,系统的响应速度越
快,同时系统的振荡减小,更有利于系统的动态性能的改善。
(二)数字 PID 控制作用分析:
仿照上述过程,独立完成 PID 离散化仿真程序编写及结果分析。
(1)比例控制作用下,取采样时间 0.001 秒。
ts=0.001;
G1=tf(1,[0.017 1]);
G2=tf(1,[0.075 0]);
G12=feedback(G1*G2,1);
G3=tf(44,[0.00167 1]);
G4=tf(1,0.1925);
0 2 4 6 8 10 12 14 16 18 20
0
10
20
30
40
50
60
70
80
90
100
Step Response
Time (sec)
Amplitude
Td=12
Td=48
Td=84
图4 D 控制阶跃响应曲线
剩余18页未读,继续阅读
184 浏览量
201 浏览量
2009-06-24 上传
2021-12-24 上传
133 浏览量
2022-10-19 上传

是空空呀
- 粉丝: 199
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- skinrestorerfilegen
- katacoda方案:Katacoda方案
- 多功能便签效果
- JSPGenCMS 4.0 20160520
- SZFMBeadando
- XX种畜牧草良种繁殖场反季节蔬菜(萝卜)加工项目商业计划书.zip
- 开店损益评估表excel模板下载
- 电子邮件地址:Spring Cloud的餐厅服务,餐厅和餐厅
- capecodseedcoop
- html5lib-0.999999999.tar.gz
- Cloth-simulation:使用质量弹簧模型模拟布料
- vicky:Vicky 是使用 ffmpeg 将视频文件转换为声音文件的 GUI 程序
- perl-orm-easy:PostgreSQL数据库内ORM
- onlineSystem:基于SSH + BootStrap的在线考试系统
- 商场设计CAD图纸
- Dizi Haberleri-crx插件
