华成系统HC-S6V2.4操作手册:六轴机器人控制
需积分: 50 60 浏览量
更新于2024-07-17
2
收藏 6.29MB PDF 举报
"伯朗特机器人使用华成系统HC-S6V2.4的操作手册,涵盖了从系统配置、安装到各个操作模式的详细说明,包括编程、手动操作、停止状态下的参数设定等。"
本文档详细介绍了华成控制系统HC-S6V2.4在六轴机器人上的应用和操作流程,旨在帮助用户理解和熟练掌握该系统的各项功能。
1. **系统配置及安装**
- **基本配置**:文档可能包含了系统的基础硬件组成,如控制器、伺服电机、传感器等组件。
- **系统安装**:介绍了如何进行系统的物理安装与接线,以及软件的初始化设置。
2. **操作界面**
- **外观及说明**:描述了控制器面板的布局,包括显示屏、按键、旋钮等元素。
- **按键功能说明**:详尽解释了每个按键的作用,如状态选择开关、功能键、轴动作键、微调旋钮和急停按钮的功能和操作方法。
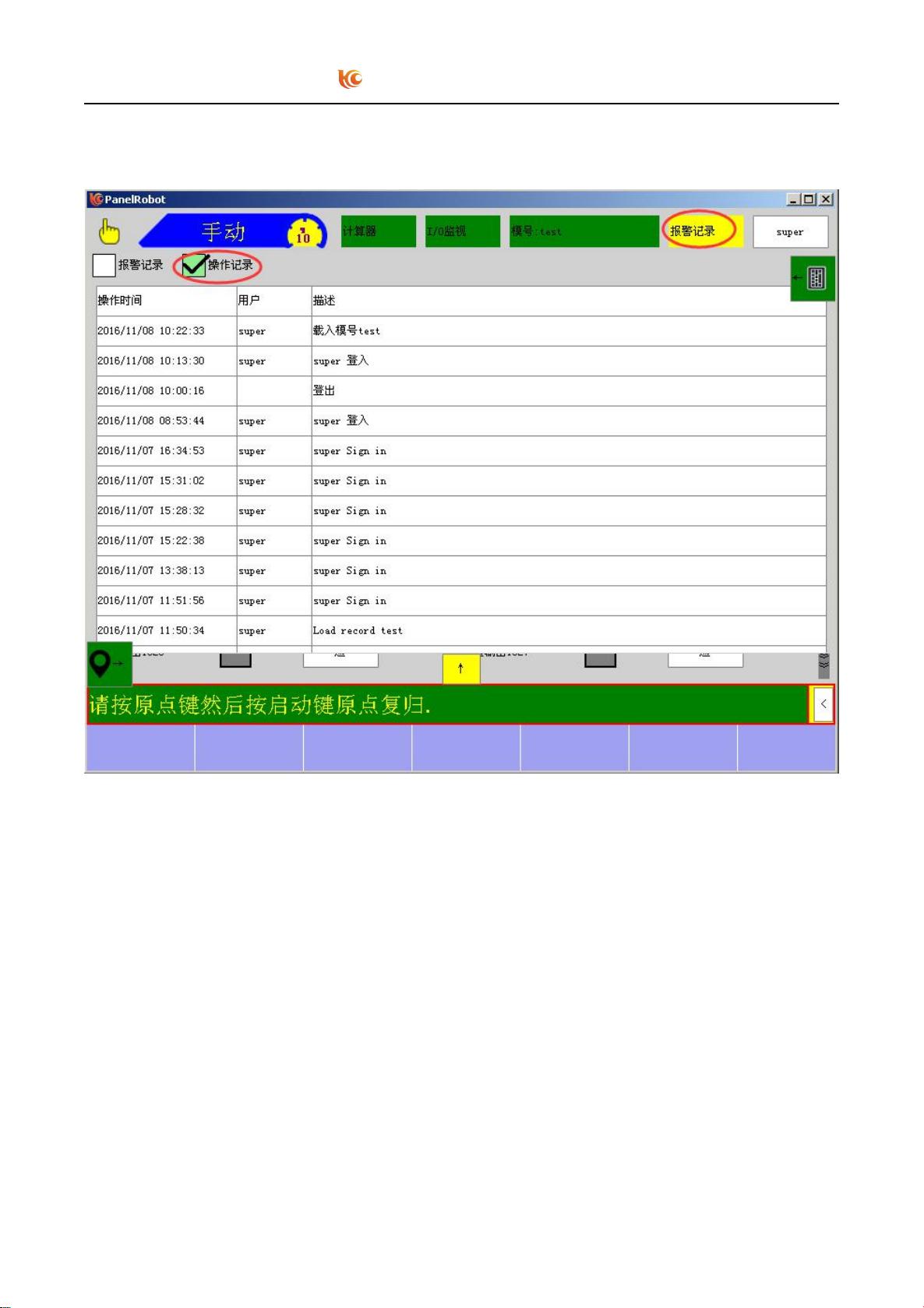
- **主画面及轴定义**:展示了主屏幕的各个部分,包括权限管理、计算器、I/O监视、模号、报警记录等功能,并解释了如何定义和操作各轴。
3. **运行模式**
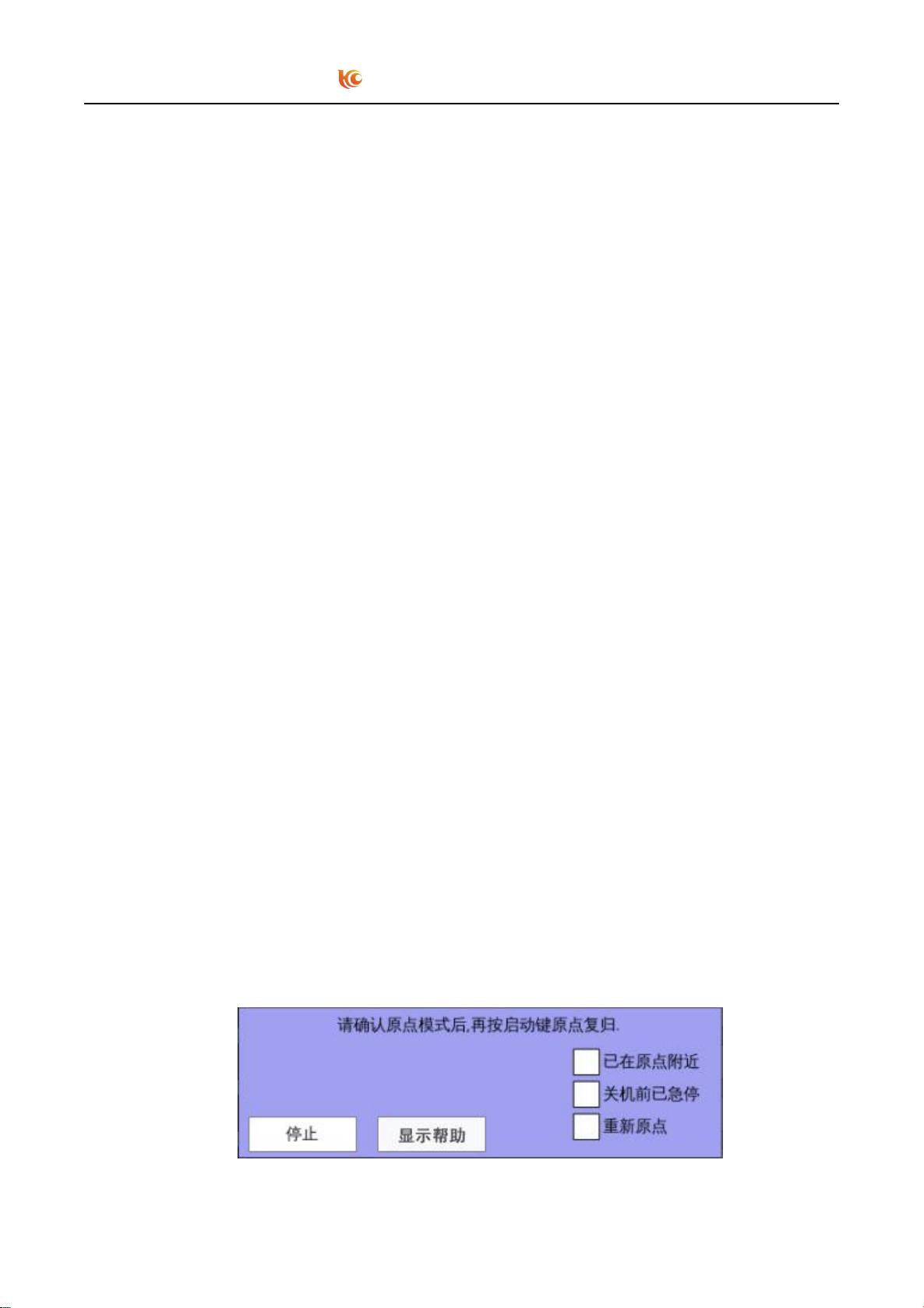
- **原点复归**:描述了机器人如何回到其零点位置的步骤。
4. **手动状态**
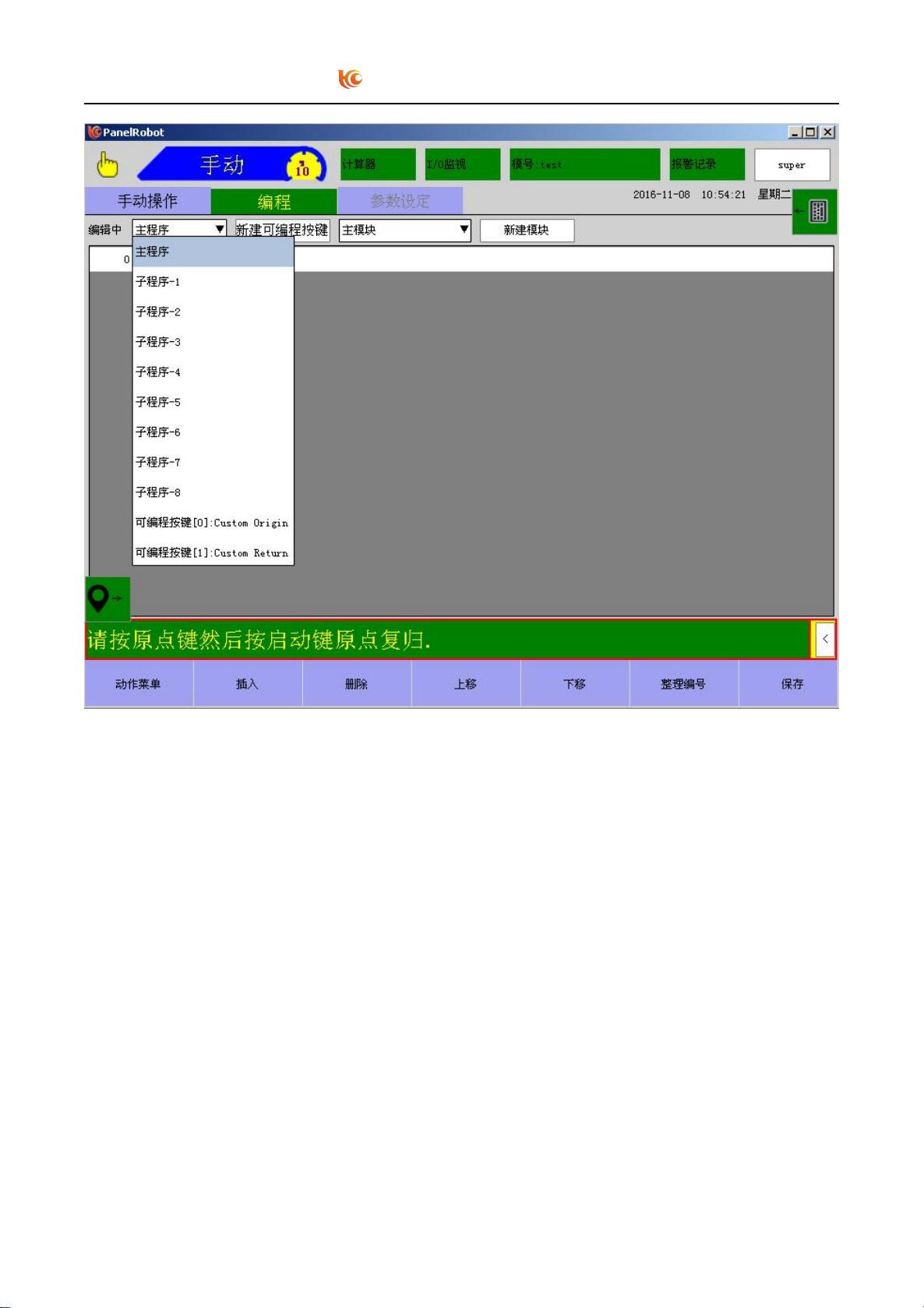
- **编程**:详细介绍了编程语言和指令,包括路径规划、信号输出、阀检测、条件跳转、等待、计数器、同步、注释、堆叠、自定义报警、模块、视觉指令、路径速度、数据指令、原点指令、扩展功能等。
- **动作菜单**:涵盖各种操作,如轴动作、路径、信号输出、阀检测等,以执行特定任务。
- **手动操作**:包括信号输出的手动控制、工具标定、可编程按键的设定以及工作台标定。
5. **停止状态**
- **参数设定**:提供了如何调整产品设定、阀设定以及机械和安全区参数的指导。
- **机械设定**:涉及运行参数、电机参数、结构参数的详细设置。
- **手控设定**:包括手控操作的定制、网络配置、图片设定、注册、维护和用户管理。
这本手册全面覆盖了华成系统在机器人操作中的各个方面,无论是初学者还是有经验的工程师,都能从中获取必要的知识和技能,有效管理和操作伯朗特机器人。

2022-04-18 上传
2022-06-15 上传
2022-11-21 上传
2022-11-21 上传
2023-09-22 上传

guanl3
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
