PID控制详解:理论、实现与应用
需积分: 9 187 浏览量
更新于2024-07-17
收藏 291KB DOCX 举报
PID控制讲座主要涵盖了控制理论与实践的关键内容,针对的是工业自动化和电子系统设计中的一个重要工具。讲座首先介绍了常用的控制算法,包括位式控制如二位式、具有回差的二位式以及三位式控制,它们各自的特点和局限性。位式控制以其简单直观但可能存在控制精度低、波动大的问题而著称,三位式控制则在此基础上增加了中间状态,旨在提供更平滑的过渡。
讲座的核心内容是PID控制算法,这是一种经典的反馈控制系统,用于调整系统输出以追踪设定值。PID代表比例(P)、积分(I)和微分(D)三个参数,它们分别对应控制系统的响应速度、消除偏差和预测未来趋势。理论部分讲解了PID控制的原理,如何通过这三个参数的精确调整来优化控制效果,减少振荡和超调,提高系统的稳定性和精度。
在单片机应用层面,讲座深入探讨了如何在基于ARM-CortexM3的STM32平台实现增量式PID温度控制。这部分涉及硬件电路分析,如传感器输入处理、PID算法的硬件实现以及与执行器的接口设计。C语言编程实现部分则是实际操作的重要环节,通过实例演示了如何编写控制程序来控制温度,展示了PID控制在实际工程中的具体运用。
此外,讲座还强调了PID算法在工程应用中的注意事项,例如选择合适的PID参数、处理噪声和干扰、以及如何根据具体系统特性进行参数调整。最后,讲座可能还会讨论PID控制与其他高级控制算法的比较,如自适应控制和模型预测控制,以扩展读者的视野。
PID控制讲座为工程师们提供了一个全面理解PID控制理论与实践的平台,对于提升控制系统的设计和调试能力,特别是在嵌入式系统和过程控制领域,具有很高的实用价值。通过学习这个讲座,参与者将能够更好地应对复杂控制系统中的挑战,并优化设备性能。
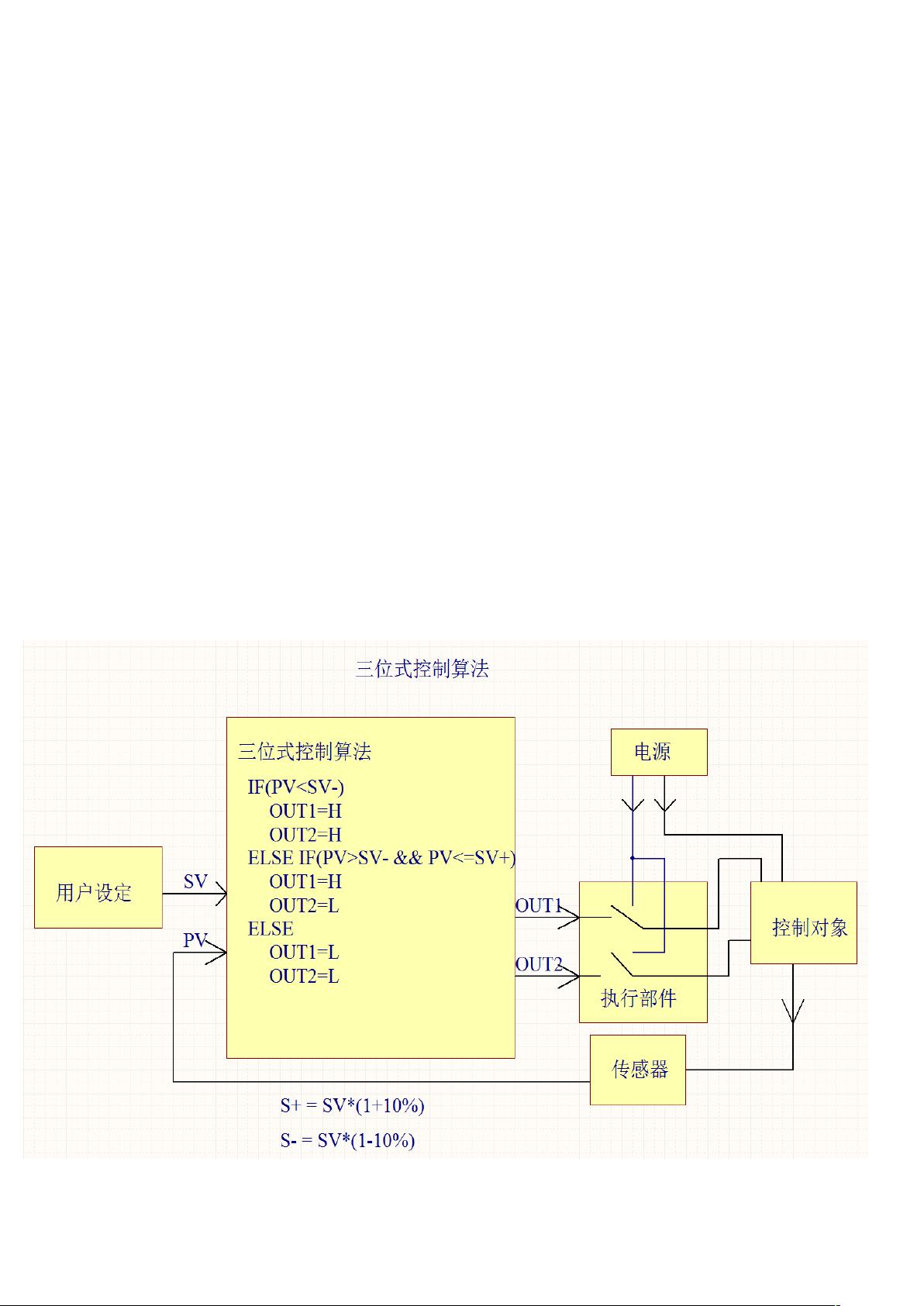
a. 取 SV 的正负 10%左右作为回差调节上下限,
高于上限才开始输出 L,低于下限才开始输出 H;
b.避免了一般二位式控制算法在临界点时执行部件
频繁动作。
c.因为控制对象只有全额运行或不运行两种状态,
仍然存在一般二位式控制算法的缺点:PV 总是在 SV
附近波动。
3).三位式控制算法
6
剩余26页未读,继续阅读
2022-06-23 上传
2022-07-02 上传

孟大仙686
- 粉丝: 3
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
