装载机行驶平顺性研究:MATLAB/SIMULINK仿真与主动控制
版权申诉
152 浏览量
更新于2024-06-19
收藏 10.81MB PDF 举报
"基于MATLAB/SIMULINK对轮式装载机行驶平顺性研究的毕业论文探讨了装载机行驶过程中的振动控制问题,旨在提升驾驶舒适性和物料完整性。论文以ZL50装载机为研究对象,设计了一种单油阻尼器完全差动连接的行驶稳定减振装置,并通过MATLAB/SIMULINK进行非线性研究,建立了耦合减振系统的数学模型。此外,还探讨了PID控制、模糊控制以及模糊+PID的主动控制策略,以适应复杂路况,改善行驶平顺性。"
这篇毕业论文深入研究了装载机行驶平顺性的重要性,特别是在恶劣工作环境中,不平路面引起的振动和冲击会影响工作效率和物料的保持。论文作者利用MATLAB/SIMULINK这一强大的仿真工具,首先详细介绍了单油阻尼器完全差动连接行驶稳定系统的构造和运作原理,建立了包含弹性力和阻尼力的数学模型。
接下来,通过Matlab/Simulink对行驶稳定系统的刚度和阻尼特性进行了非线性分析。论文构建了二自由度的动力学模型,对比分析了加装行驶稳定系统后的装载机在阶跃信号和D级路面滤波白噪声激励下的减振效果,以此评估系统的性能。
考虑到实际工况中的道路复杂性和油气减振系统的固定参数局限,论文引入了主动控制的思想。具体来说,详细探讨了PID控制、模糊控制理论及其参数整定方法,并结合动力学模型,建立了PID主动控制、模糊控制以及模糊+PID三种控制策略的悬架系统。论文选择了D级和E级两种代表性复杂路面,以工作装置垂直加速度、悬架动挠度和轮胎动位移作为评价指标,利用Matlab-fuzz工具箱进行了仿真对比,验证了这些主动控制策略的有效性。
关键词涵盖了装载机、行驶稳定系统、平顺性、刚度特性、阻尼特性以及主动控制等多个核心概念,表明这篇论文全面地探讨了装载机行驶平顺性的各个方面,特别是在利用现代控制理论和MATLAB/SIMULINK技术优化减振性能方面的贡献。

华北水利水电大学硕士学位论文
10
的无杆腔,无杆腔的回油量等于 B
1
支路及 B
2
支路排出油液的和。油路循环路线
如下:
B
1
支路回油:蓄能器 1→油路 5→电磁阀 2→油路 9→油阻尼器 6→举升油缸
11
的无杆腔;
B
2
支路回油:举升油缸 11 的有杆腔→电磁阀 12→油阻尼器 6→举升油缸 11
的无杆腔;
2.1.3 单油阻尼器完全差动连接行驶稳定悬架系统的特点
①本设计的新型悬架系统针对于现技术中的减振系统做了改善,具有结构简
单、功能性强、适用性强的优点。
②采用两个外接电路的两位两通电磁换向阀控制整个系统,阀 2 控制蓄能器
的连通,阀
12
控制着动臂举升油缸无杆腔和有杆腔的连通,其意义在于,当装
载机作业工况,当两个阀同时关闭时,行驶稳定系统不起作用,当装载机行驶工
况,两个电磁换向阀开启,行驶稳定系统起作用。
③采用油阻尼器来代替可调节流阀或阻尼阀,油阻尼器在一定条件下可以补
偿油液在管道内摩擦力和空气阻力的损失。动臂举升缸
11
活塞杆做往复运动,
蓄能器 1 来吸收振动,且油阻尼器 6 又能起到阻尼阀的效果,将动能转化为热能
释放,从而起到双重缓冲吸能的作用。
2.1.4 蓄能器的选型
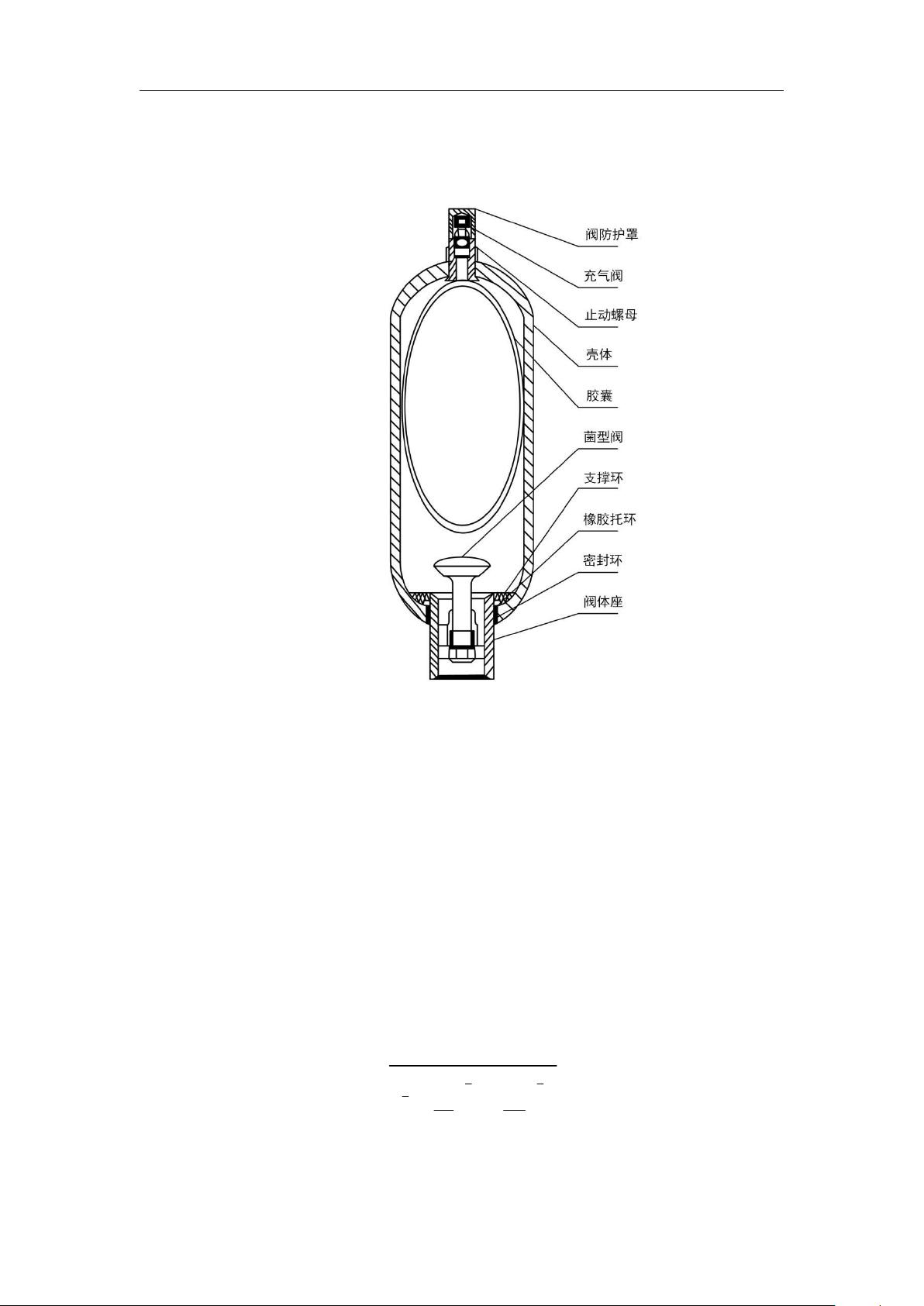
如图 2-4 所示的蓄能器作为轮式装载机行驶稳定系统中的重要液压元件,其
工作原理在气液平衡的基础上将液压系统中的一部分液压能量吸收并转化为势
能进行储存以维持整个系统压力正常,当行驶稳定系统需要的时候,蓄能器将势
能转换成液压能量且释放出来,释放的能量对整个液压系统做功。蓄能器不仅可
以吸收液压冲击脉动压力,而且构成恒压油源能短时间内快速储存或释放大量的
液压油液,液压油的缓冲作用有效的消除脉动降低噪声和提高了其它液压元件的
使用寿命。
图 2-4 蓄能器
Figure 2-4 Accumulator


剩余94页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-10-29 上传
2023-11-01 上传
2023-10-29 上传
2023-10-30 上传
2023-11-01 上传
2023-10-29 上传


xox_761617
- 粉丝: 29
- 资源: 7802
 我的内容管理
展开
我的内容管理
展开







最新资源
- 绿色清新植物叶子背景PPT模板
- Weather_Dashboard:一种天气应用程序,可让您搜索城市并向其提供该城市的天气
- RCGroupsScraper:抓取RC组主页以自动搜索您的Python工具,并在您搜索的内容弹出时通知您
- phaser-ce:Phaser CE是一个有趣,免费且快速的2D游戏框架,用于为桌面和移动Web浏览器制作HTML5游戏,支持Canvas和WebGL渲染。
- OnBoardingAnimation
- VC电脑版雷电程序及源码
- MUL_my_rpg_2019
- BPHero_UWB_Location_SourceCode_V3.1_16MHz_V3.01.rar
- mysql代码-请假表 ask_leave
- cart
- caxlsx:具有图表,图像,自动列宽,可自定义样式和完整架构验证的xlsx生成。 Axlsx擅长帮助您生成漂亮的Office Open XML Spreadsheet文档,而无需了解整个ECMA规范。 查看自述文件,了解一些简单的示例。 最重要的是,您可以在序列化之前验证xlsx文件,以确保确定生成的任何内容都将加载到客户端计算机上
- covmonitor:Elixir应用程序以监视covid
- js代码-1. 两数之和 [简单] https://leetcode-cn.com/problems/two-sum
- DirectX修复工具及DirectX修复工具增强版
- FourLanglearn:该项目满足了我用4种语言解决同一问题的所有练习
- cyglfw3:GLFW3的Cython绑定
