PCL点云处理教程:输入输出(IO)与OpenNI框架
需积分: 27 100 浏览量
更新于2024-07-18
收藏 1.58MB PPTX 举报
"点云库PCL学习教程 4"
在点云处理技术中,PCL(Point Cloud Library)是一个关键的工具,广泛应用于多个领域,如逆向工程、机器人学和3D测量等。由于点云技术涉及多门学科,它的普及曾受到获取设备成本高的限制。然而,随着技术的发展,PCL提供了丰富的功能,包括对点云数据的输入、输出以及与其他3D文件格式的转换。
在PCL中,输入输出(IO)是处理点云数据的基础。PCL支持多种设备获取点云数据,例如微软的Kinect,它利用OpenNI开源框架进行交互。OpenNI是一个跨平台的框架,旨在促进自然交互应用的开发,其核心在于定义了一套API,使传感器设备和中间件能够高效通信,处理和理解来自环境的视觉和音频信息。OpenNI的开放性允许开发者编写一次代码,就能在不同平台上运行,减少了对特定传感器或中间件的依赖。
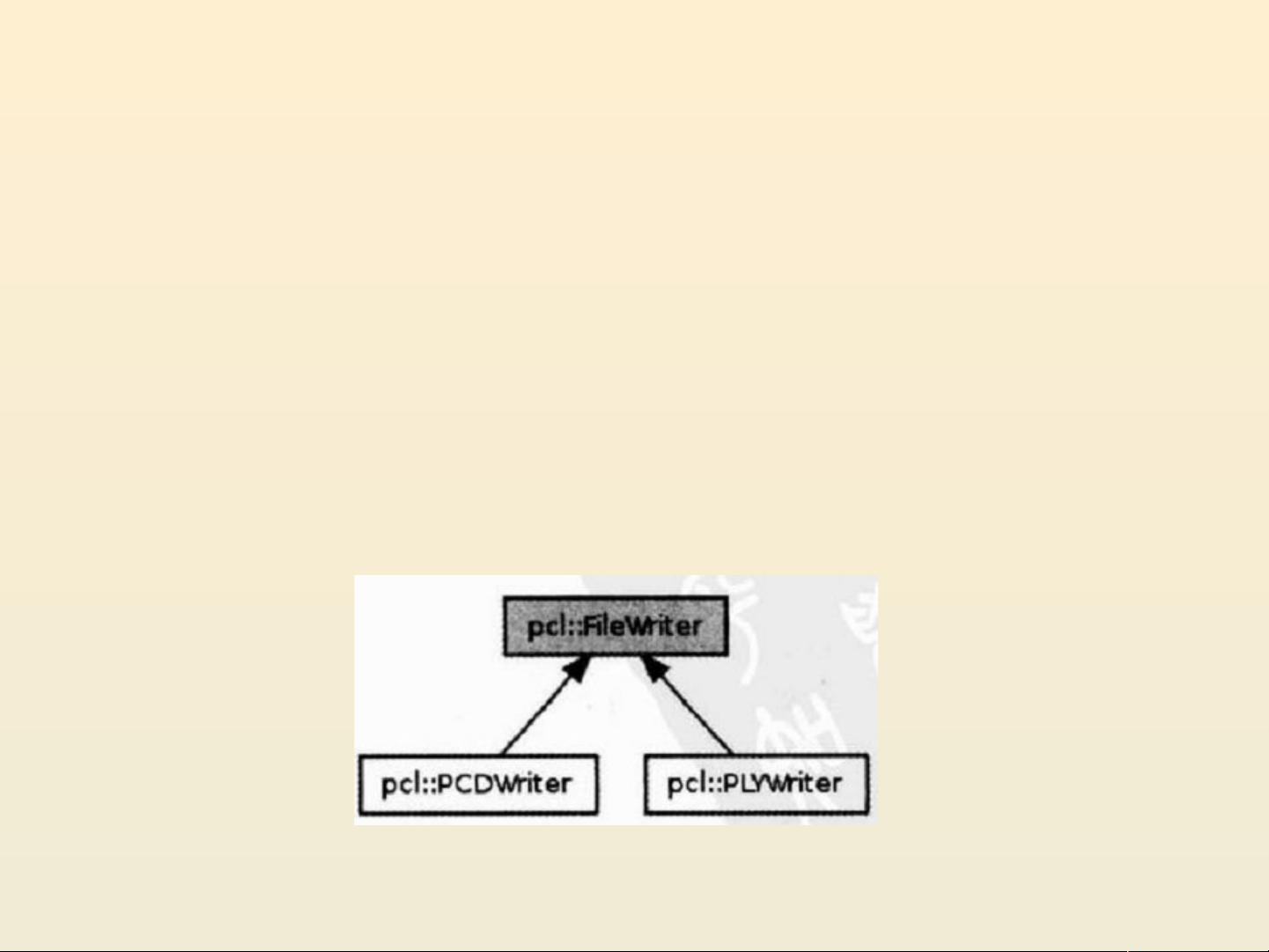
PCL的IO模块包含了处理这些设备和数据格式的类。它不仅支持自己的PCD文件格式,还能够读取和写入多种常见的3D文件格式。这些接口类使得在不同格式之间转换变得更加便捷。例如,用户可以通过PCL的API读取一个PCD文件,然后将其保存为其他格式,如OBJ或STL,或者反之。
在学习PCL的IO模块时,通常会从理解涉及的设备和相关概念开始,例如OpenNI框架的基本原理和工作方式。接着,会深入到PCL的IO模块,了解相关的类和函数,如点云数据的读取和写入方法。最后,通过实际应用案例,学习如何在实际项目中灵活运用这些功能,比如使用PCL读取Kinect获取的点云数据,然后进行存储或进一步处理。
在“4.1 I/O涉及的设备及相关概念简介”部分,会详细介绍OpenNI及其如何与传感器和中间件协同工作。在“4.2 PCL中I/O模块及类介绍”中,会探讨PCL提供的API和类,帮助开发者理解和使用这些工具。而在“4.3 应用实例解析”中,会通过具体的编程示例,演示如何在实践中进行点云数据的输入输出操作。
PCL的IO模块是点云处理的关键组成部分,它连接了硬件设备与软件处理,使得数据的获取、存储和交换成为可能。学习并掌握这部分内容,对于有效地利用PCL进行点云处理至关重要。
类 5!%' 关键成员函数:
8-%!%'9%'"'::&;<!3%=
"3&::"!"-';!"-'=6&::7"*;"&=
6&::>-%"*;"%/"=;<!38"=;'%%3?=
-&';'%%3'0=""@AA
纯虚函数,定义读取点云文件头的接口函数,其参数意
义:
<!3% 读取文件的文件名。
!"-' 存储读取后的点云数据,但只填充文件头(关于
文件格式详见本章后面实例分析)。
"& 点云获取原点,该参数只有在文件版本大于 5637B 才
存在,否则为 C 。
"%/" 点云获取方向,该参数只有在文件版本大于
5637B 才存在,否则为 C 。
<!38" 文件版本( 5637B 或者 56372 )。
剩余63页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-09-14 上传
2018-06-01 上传
2022-12-27 上传
2018-03-02 上传
101 浏览量

shaozhenghan
- 粉丝: 262
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- example-website:在以下网站发布事件的示例网站
- 学习201
- 电力设备行业:特斯拉产能加速扩建,光伏平价时代方兴未艾.rar
- TechAvailabilityBot
- whoistester WrapEasyMOnkey:查看monkeyrunner 脚本的交互jython 库-开源
- vc游戏编程库的源程序,如A*算法 A星算法 AStar自动寻路算法
- GenomicProcessingPipeline:用于处理“原始”基因组数据的管道(全基因组测序,RNA测序和靶标捕获测序)
- 行业文档-设计装置-一种制备弯曲钢绞线的装置.zip
- config-server-data
- 蓝桥杯嵌入式 mcp4017 iic
- com.tencent.mtt.apkplugin.ipai9875.zip
- kokoa-talk:带有克隆编码(HTML,CSS)
- TaTeTi:TaTeTi多人游戏(进行中)
- 下午
- the-button-clicker:自动按下 reddit 上的“按钮”的 chrome 扩展
- 行业文档-设计装置-一种切纸机的斜刀连动机构.zip
