FANUC伺服调整指南:基础篇
版权申诉
106 浏览量
更新于2024-07-20
1
收藏 1.32MB PDF 举报
"FANUC B-65264CM-01伺服调整步骤(基础篇)涵盖了伺服电机的详细调整方法,适用于FANUC AC伺服电机的不同系列。该文档旨在帮助用户通过伺服向导(SERVOGUIDE)进行高效且精准的伺服参数设定和增益调整,以实现系统的高速高精度运行。"
本文档首先介绍了伺服调整的重要性,特别是在FANUC系统中,伺服调整是确保设备性能的关键环节。文档分为多个章节,逐步指导用户进行各项设置和调整。
2. 高速高精度伺服参数设定:这部分详细列出了Series 16i/18i/21i/0i等型号的伺服电机在高速高精度运行时所需的相关参数设定值,帮助用户了解如何优化电机性能,以达到快速且准确的定位。
3. 调整导航器(Tuning Navigator)的增益调整:此章节阐述了如何使用内置的Tuning Navigator工具进行增益和过滤器的调整,以确保系统稳定并减少振动。
4. 加/减速调整:讨论了如何调整快速移动时间常数和位置增益,以实现平滑的加减速过程,防止过冲或振荡。
5. 圆弧调整:包括前馈系数和反冲加速的调整,以优化圆弧运动的精度和速度。
6. 四角调整:介绍了拐角减速功能、切削进给时间常数和速度前馈的设定,确保在转角处的平稳过渡。
7. 带1/4圆弧四角形状的调整:针对特定的四角运动,提供了设定方法以提升轨迹精度。
8. HRV3控制:详述了HRV3控制的参数设定、工作模式、状态检查以及高速HRV电流控制模式的效果,这是一种高级控制技术,可提高高速运行时的响应性和稳定性。
9. 反冲加速:详细讲解了反冲加速功能的原理、初始参数设定和调整方法,以减少停止或改变方向时的冲击。
整个文档内容详尽,适合FANUC伺服系统的技术人员参考,通过遵循这些步骤,用户可以有效提升设备的工作效率和加工精度。值得注意的是,文档中强调未经许可不得复制,并且所有规格和设计可能会随时间更新,用户在操作时应参考最新的技术资料。
B-65264CM/01 1.前言
- 5 -
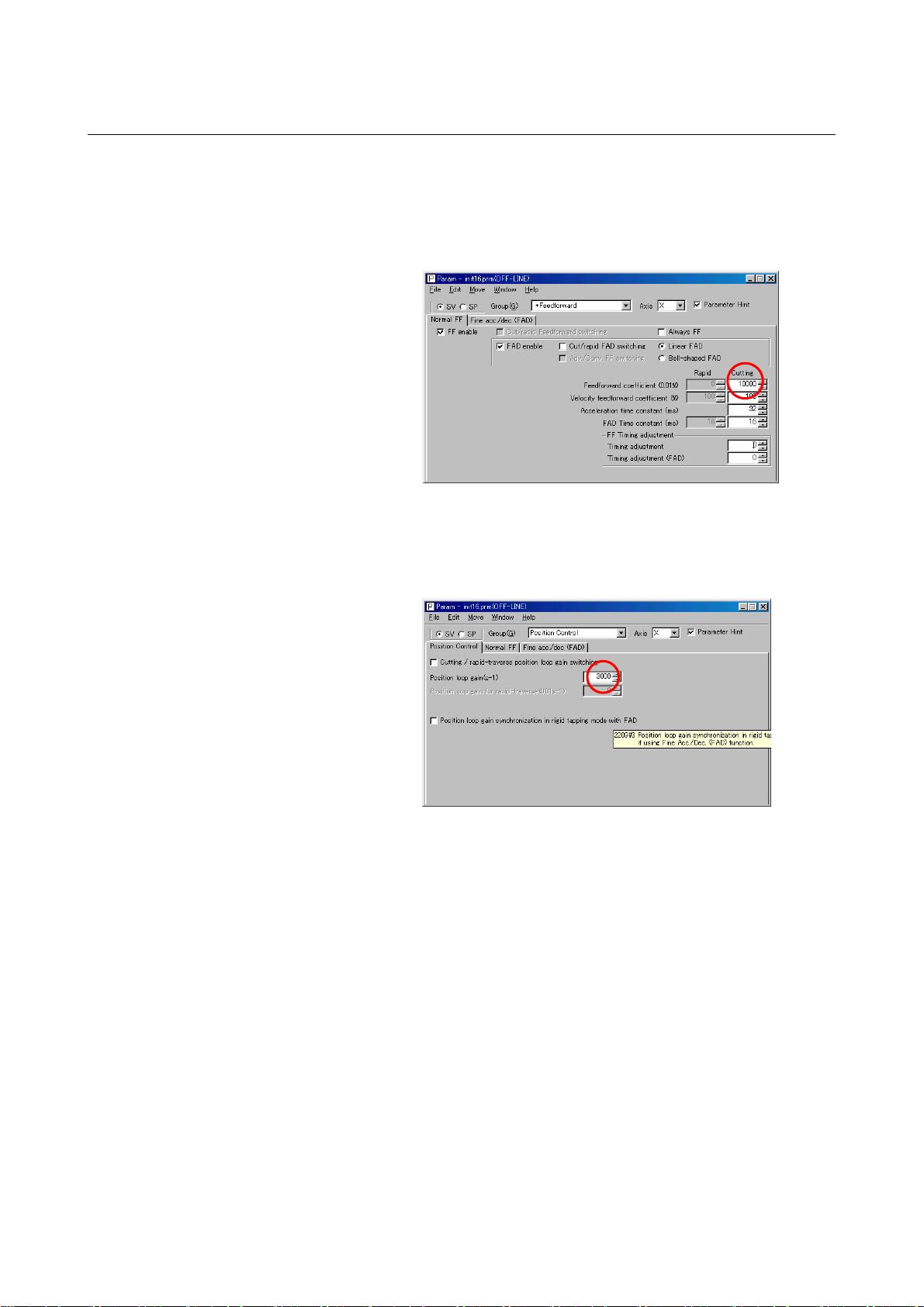
• 前馈系数调整 (*5)
通过设定前瞻前馈,可以消除伺服的跟踪延迟,同时将外形误差控制到最
小。通常,前馈系数采用 97%~100% 。
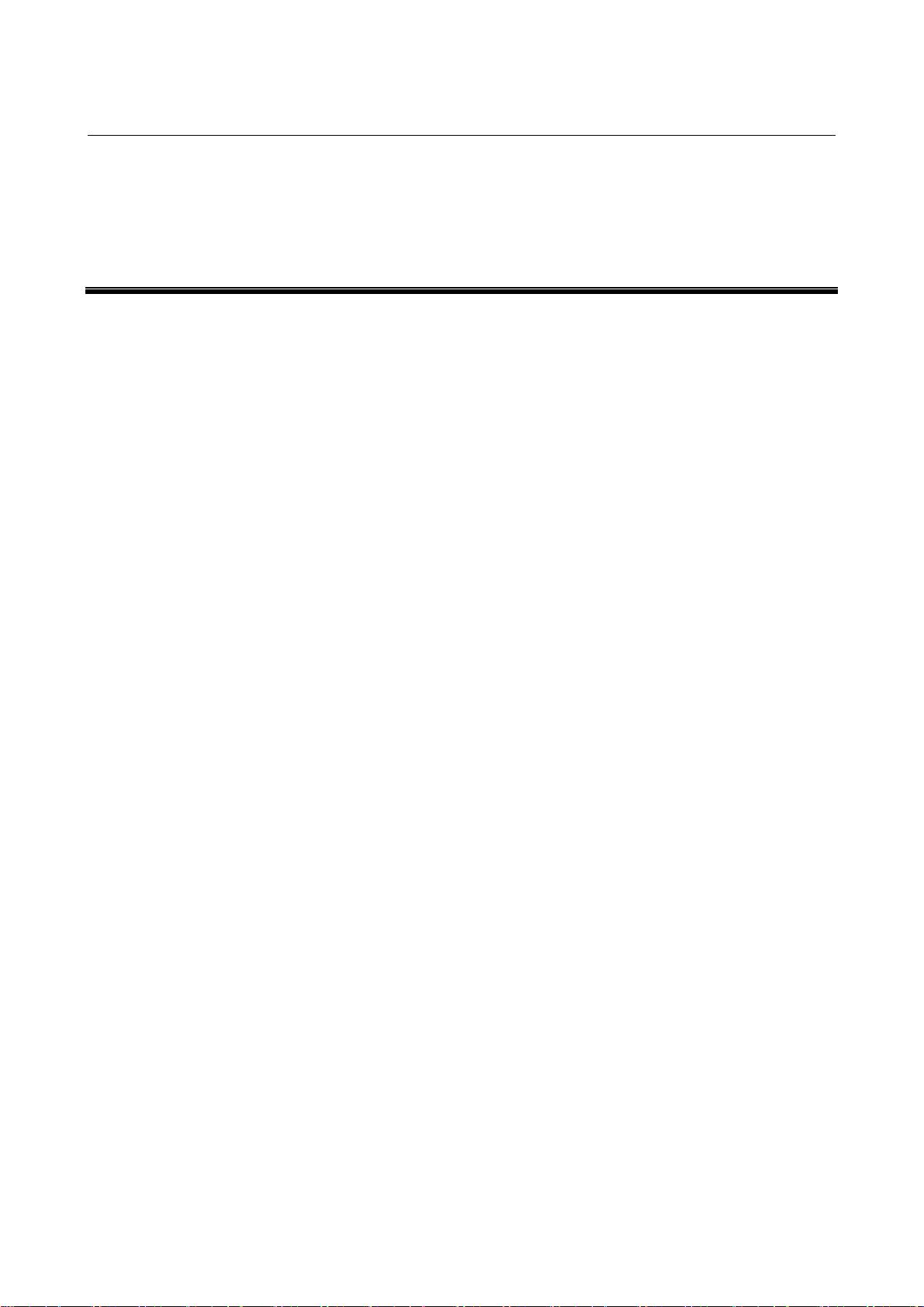
• 位置增益的设定 (*6)
提高了速度环路的响应性后,也可以设定高的位置环路增益。高的速度环路
增益对于减少位置偏差有效。
剩余51页未读,继续阅读
2021-10-02 上传
2021-04-30 上传
2023-08-03 上传
2023-07-28 上传
2023-04-13 上传
2023-07-31 上传
2024-01-13 上传
2023-04-13 上传
2023-04-13 上传

电动汽车控制与安全
- 粉丝: 266
- 资源: 4186
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
