7自由度工业机器人机械结构设计与分析
版权申诉
141 浏览量
更新于2024-06-23
收藏 1.46MB DOC 举报
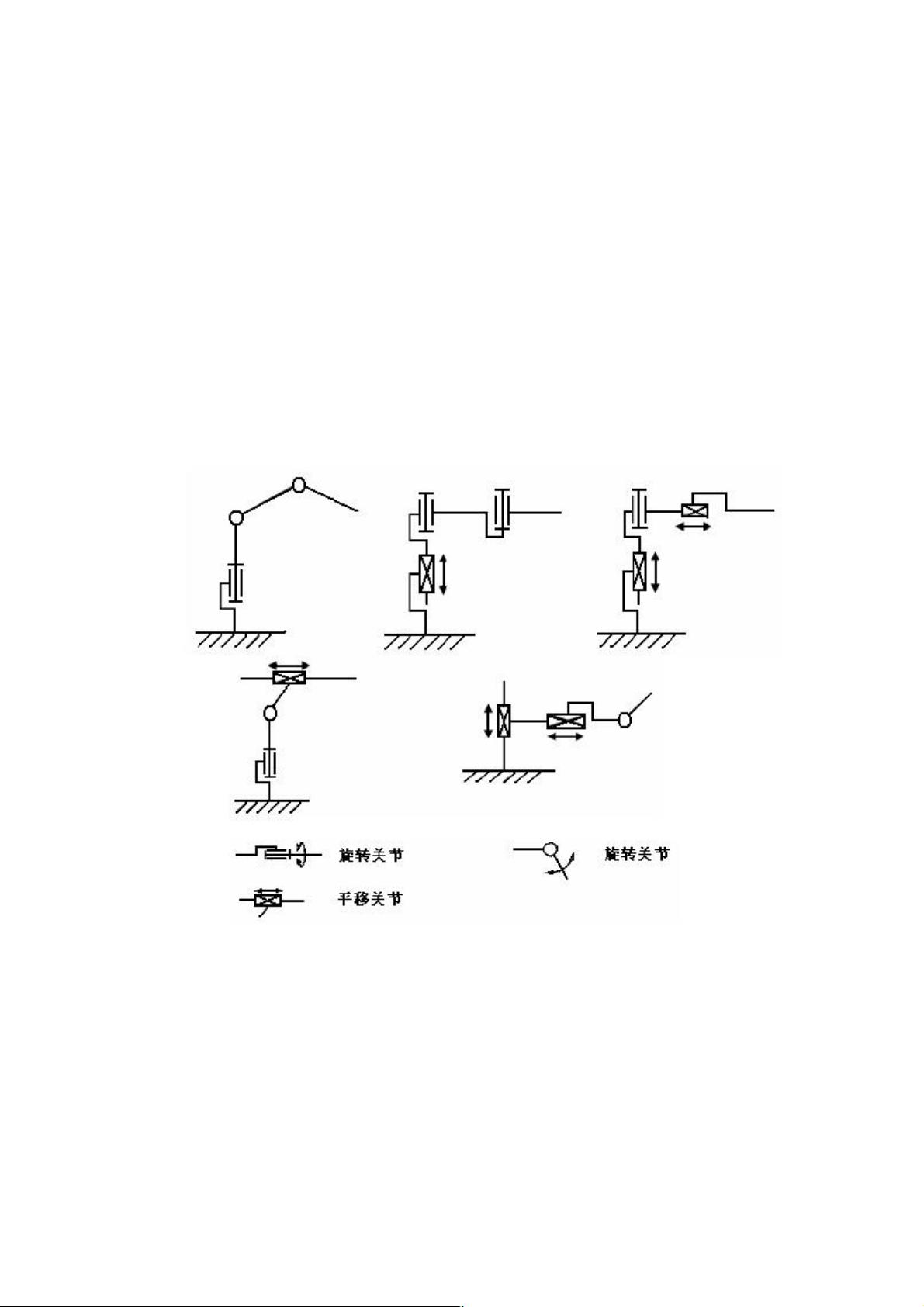
"本文主要探讨了7自由度工业机器人的机械结构设计,重点在于其灵活性、工作范围和紧凑性。文章中提到的机器人设计承载能力为3公斤,工作半径达到1434毫米,主体重量为150公斤。设计包括S型腰部回转、L型小臂摆动、E型大臂回转、U型臂部俯仰、R型腕部扭转、B型腕部俯仰和T型腕部回转等7个自由度的关节。这种冗余自由度的设计使得机器人能在确保最佳焊接姿态的同时,避免工件和夹具对工作臂的干涉。"
7自由度的工业机器人是一种高级的自动化设备,因其在复杂任务中的高适应性和灵活性而被广泛应用。在这个设计中,每个关节都采用了交流电机驱动,保证了高速、高效的工作性能。为了优化传动效率,机器人手臂采用了专用减速器,这能够提供必要的扭矩并减少体积。特别地,B和T腕部关节还采用了同步带传动,以实现更精确和灵活的动作控制。
在设计过程中,对每个关节的转动惯量、角速度和加速度等关键参数进行了深入分析,以确保机器人在各种工况下都能稳定运行。通过对电机功率和转矩的计算,选择合适的电机型号以满足所需的驱动力;同时,计算减速器的减速比,以保证动力传输的有效性和精度。此外,同步带的选择也经过了严谨的考虑,以满足高速和高精度的传动需求。
通过UGNX6.0软件,完成了机器人的关节三维仿真模型设计,并进行了整体装配,这一过程不仅验证了机械结构的可行性,也为后续的动力学分析和运动控制奠定了基础。此7自由度工业机器人的设计为未来的研究和发展提供了宝贵的参考,它将促进工业自动化水平的提升,特别是在焊接、装配等领域。
关键词:7自由度,工业机器人,机械结构,动力学分析,运动控制,交流电机,减速器,同步带,三维仿真模型

7 自由度工业机器人机械结构设计
本课题设计机器人为 7 款电机单独驱动。由于在同样的体积条件下,关节型
机器 人比非关 节型机器 人有更大 的相对空 间(手腕可 达到的最 大空间体 积与机器
人本体外壳体积之比)和绝对工作空间,结构紧凑,同时关节型机器人的动作和轨
迹更灵活,因此设计的机器人采用关节型结构。机器人结构为垂直关节型。
2.3 机器人的基本技术要求
该机器人的特点是工作范围大,动作灵活,结构较紧凑,用于弧焊焊接。根
据 MOTOMAN-VA1400 的用途和特点提出如下技术参数:
自由度数目:7 个,坐标形式:垂直关节型,有效载荷: 3kg ,机器人精度:
−0.08 ~ �0.08 ,工作范围: R ��1434mm ,本体重量: 150kg
机器人各参数要求见下表 2-1。
轴 最 大 运 动 范
表 2-1 机器人运动参数
最大角速度 转速 各 关 节 允 许 转动惯量
围 [度]
�
s
rad
s
极限力矩
N ⋅�m
kg ⋅�m
2
S 腰部回转 -170~+170 220 3.84 ------- -----
L 小臂摆动 -70~+148 200 3.49 ------- -----
U 臂部俯仰 -175~+150 220 3.84 ------- -----
R 腕部扭转 -150~+150 410 7.16 8.8 0.27
B 腕部俯仰 -45~+180 410 7.16 8.8 0.27
T 腕部回转 -200~+200 610 10.65 2.9 0.03
E 大臂回转 -90~+90 220 3.84 -------- ------
9


剩余75页未读,继续阅读
2023-07-11 上传
2021-10-12 上传
2023-07-11 上传
107 浏览量
2023-07-12 上传
2023-07-12 上传

老帽爬新坡
- 粉丝: 99
 我的内容管理
展开
我的内容管理
展开







最新资源
- Delphi纯源码QR二维码生成器支持中英文
- 罗克韦尔CENTERLINE 2500智能马达控制中心的特性与功能
- ARIMA模型预测股票价格准确性分析与未来工作展望
- ECharts图表应用与区间查询功能展示
- Java+EE技术面试题解析与源码工具应用
- 探索SVG在WebGIS开发中的应用与源码解析
- JAVA常用算法项目:LeetCode分类刷题指南
- Desech Studio中Angular插件的使用与测试教程
- 51单片机走马灯效果的Proteus仿真教程
- JavaScript塔围攻1第32章核心解析
- 罗克韦尔可视化解决方案选型指南全面解析
- LeetCode刷题指南:按语言分类的编程题库
- Kali Linux环境下WiFi攻击与防护技术分析
- pickadate.js-gh-pages压缩包使用教程
- MV C++ 14.0新版本特性及功能介绍
- Bootstrap网页自定义选项查询字符串插件介绍
