机动目标跟踪与反跟踪:加速度分析与模型算法
版权申诉
PDF格式 | 3.22MB |
更新于2024-07-04
| 96 浏览量 | 举报
"拟合算法-机动目标的跟踪与反跟踪 (3).pdf"
这篇文档主要探讨了机动目标的跟踪与反跟踪技术,特别是在数学建模竞赛中的应用。它提出了几个关键问题并给出了相应的解决策略。
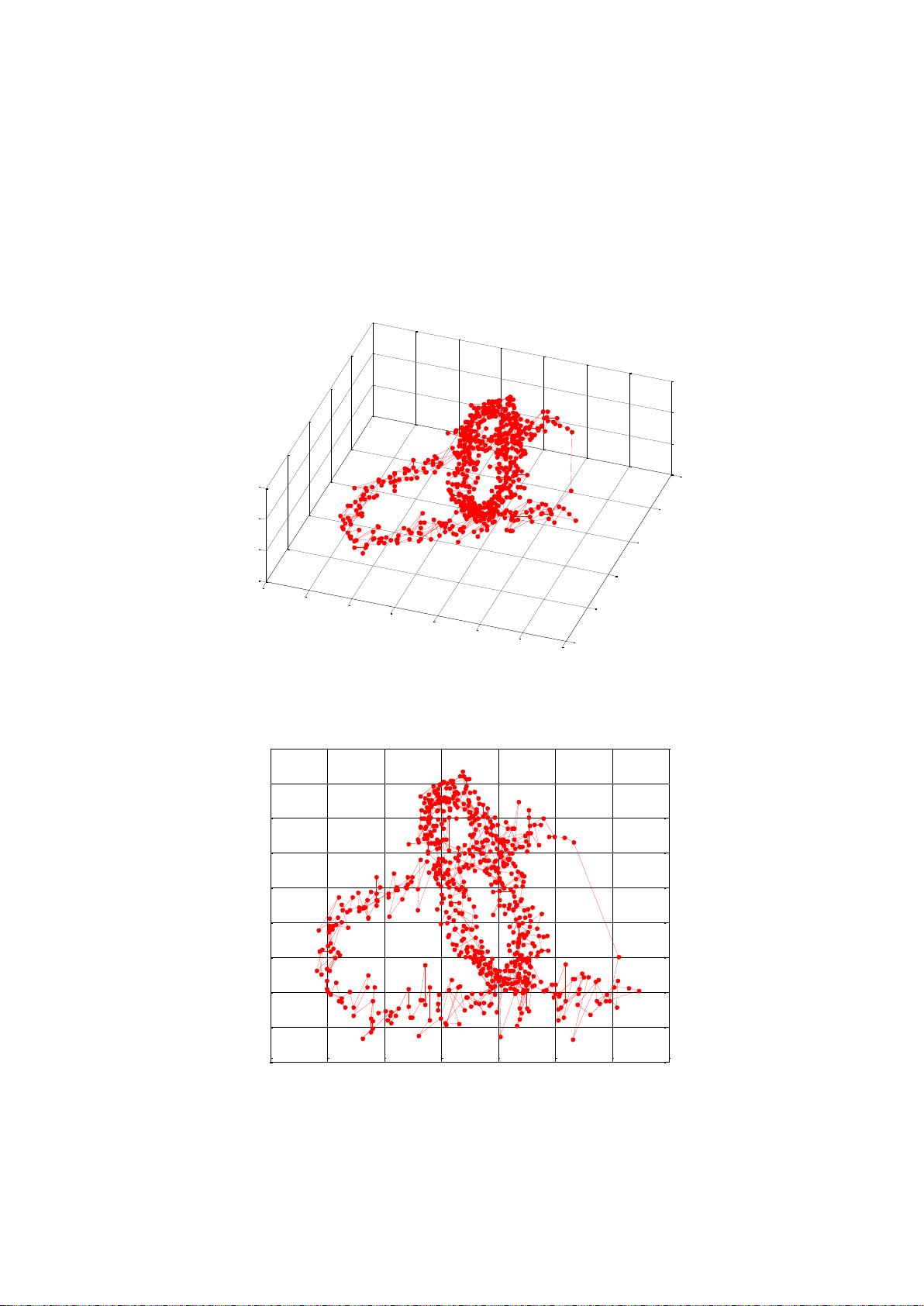
首先,文档关注的是单机动目标的跟踪问题。这个问题被分为两个步骤来解决。步骤1涉及对目标加速度的统计分析,通过曲线拟合技术来估算加速度,发现目标主要在7个特定时间段内进行机动。步骤2则运用交互式多模型算法(IMM)来设计模型集进行在线跟踪。这里提到了两种模型集设计方法:一种是固定模型结构,包括匀速模型(CV)、匀加速模型(CA)和匀速转弯模型(CT);另一种是基于统计加速度信息的变结构多模型算法,模型集包含了7个具有不同加速度输入的模型。实验结果显示,算法2(基于统计信息的变结构算法)在估计精度上优于算法1。
接下来,文档讨论了航迹起始和点迹航迹关联问题。航迹起始采用逻辑和一步延迟结合的方法,确定临时航迹点,然后通过关联新量测点和现有临时航迹来创建或更新航迹。点迹航迹关联则有两种算法:一是基于数据拟合的关联,预测目标位置并应用最近邻准则;二是基于交互式多模型滤波的关联,通过实时预测航迹并与下一时刻的量测点进行最近邻关联,这种方法实时性更强。
此外,文档还引入了航迹管理的概念,通过控制航迹质量来起始、维持和撤销航迹,这在处理动态环境中的目标跟踪非常关键。
在问题三中,曲线拟合技术再次用于分析目标的机动变化规律,揭示了目标的行为模式。
这篇文档深入探讨了机动目标跟踪的数学模型和算法,涵盖了从目标加速度统计分析到航迹管理的多个方面,对于理解和解决复杂的动态跟踪问题提供了理论和技术支持。

8
而 e 和 Eq 分别是地球偏心率和地球半径。
又假定目标在东北天坐标系的位置是
( , , )
l l l
x y z
,此时
( , , )
l l l
x y z
坐标系与
( , , )x y z
坐
标系即 ECEF 坐标系的关系如图 4-1-2 所
示,其旋转变换角分别为
s
(经度)和
s
l
(纬度)。
坐标变换关系为
l
t l t l
l
xx
X y R y R X
zz
(1-4)
其中
t
R
表示由东北天坐标系到 ECEF 坐标
系的旋转变换,即
sin cos 0 1 0 0
cos sin 0 0 sin cos
0 0 1 0 cos sin
ss
t s s s s
ss
R l l
ll
sin sin cos cos cos
cos sin sin cos sin
0 cos sin
s s s s s
s s s s s
ss
ll
ll
ll
(1-5)
再考虑由于雷达传感器中心并不在 ECEF 坐标系中的原点,实际的变换公式是
s
z
x
y
s
l
l
z
l
x
l
y
( , , )
s s s
x y z
地心
s
h
q
E
图 1-2 东北天坐标系与 ECEF 坐标系
s
l
()
l
zU
()
l
yN
y
z
(0 )
ll
yz
(0 )yz
s
()
l
xE
()
l
yN
y
x
( 0)
ll
xy
( 0)xy
(a)纬度角旋转 (b)经度角旋转
图 1-3 东北天坐标系到 ECEF 坐标系的旋转变换
剩余40页未读,继续阅读
相关推荐



普通网友
- 粉丝: 13w+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
