物联网控制实验:传递函数与结构图建模
 已收录资源合集
已收录资源合集
需积分: 0 44 浏览量
更新于2024-07-01
收藏 949KB PDF 举报
本资源是一份关于物联网控制实验的笔记,主要介绍了MATLAB中用于分析和设计线性定常系统的数学模型。笔记分为两个主要部分:
1. 常用数学模型:
- 传递函数模型:传递函数是描述线性定常系统动态特性的一种基本方法,它表示输入信号与输出信号之间的关系。在MATLAB中,传递函数由分子多项式num和分母多项式den组成,如`sys=tf(num,den)`。分子多项式按s的降幂排列,如`[b1,b2,...,bm,bm+1]`,分母多项式同理。通过函数`tf2zp()`可以将传递函数转换为零极点增益模型,`zp2tf()`则反之。
- 零极点增益模型:该模型表示系统增益K、零点zi和极点pj的集合,用`[z,p,K]`的形式表示。例如,`sys1=zpk(sys)`将传递函数转换为零极点形式。
- 部分分式展开:函数`residue()`用于对传递函数的比进行部分分式展开,有助于理解和设计复杂的控制系统。
2. 控制系统结构图模型:
- 串联连接:两个或多个环节G1(s)和G2(s)通过串联方式组合,`[num,den]=series(num1,den1,num2,den2)`计算串联后的传递函数。
- 并联连接:系统通过并联连接时,多个环节的传递函数相加,`[num,den]=parallel(num1,den1,num2,den2)`。
- 反馈:闭环控制系统中,常用`cloop()`和`feedback()`函数来处理反馈信号。`cloop()`函数适用于单位反馈情况,`[num,den]=cloop(numg,deng,sign)`用于计算闭环传递函数。
这些内容对于理解和设计基于MATLAB的物联网控制系统至关重要,包括系统建模、分析其动态性能以及实现不同的系统结构。通过熟练运用这些工具和概念,可以有效地解决实际工程中的控制问题。
161640111-杜云-物联网控制.md 6/28/2019
5 / 23
2.1 三种形式的模型
2.1.1
传
递
函
数
模
型
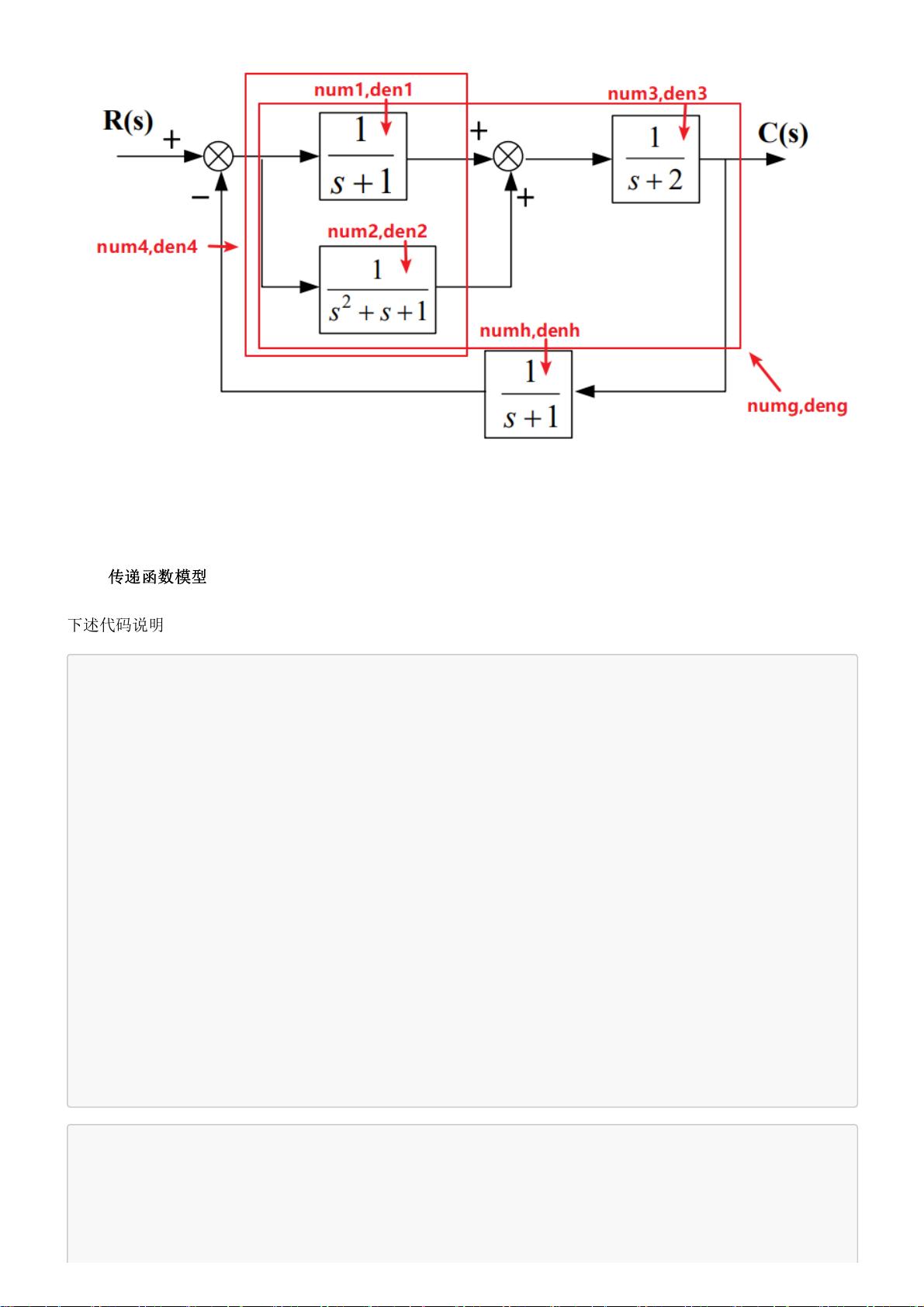
下述代码说明: 首先对图中的每个
clc,clear;
num1=[1];
den1=[1 1];
num2=[1];
den2=[1 1 1];
num3=[1];
den3=[1 2];
[num4,den4]=parallel(num1,den1,num2,den2);
[numg,deng]=series(num4,den4,num3,den3);
numh=[1];
denh=[1 1];
[num,den]=feedback(numg,deng,numh,denh,-1)
num =
0 0 1 3 4 2
剩余22页未读,继续阅读
2012-12-07 上传
2020-06-03 上传
166 浏览量
2021-11-07 上传
290 浏览量
2021-10-31 上传
2025-02-19 上传

邢小鹏
- 粉丝: 34
 我的内容管理
展开
我的内容管理
展开







最新资源
- 免费下载简约欧美海边建筑风格PPT模板
- C语言经典电机PID控制源码包
- ezjs_min:OCaml库中的js_of_ocaml便捷工具集合
- 解决Windows 2003服务器安装证书缺少文件的问题
- 自然语言识别驱动的高级多元多项式计算器
- 免费下载海贼王卡通PPT模板合集
- STC12C5616AD ADC转换源码分析及C语言项目实战
- ThinkPHP5.1框架开发的商业开源CRM系统介绍
- 清新淡雅花卉PPT模板,免费下载的精美设计
- ASP.NET中JS与JQuery的Ajax使用技巧
- DropEngine: 利用Python打造快速构建复杂shellcode的有效负载框架
- MEAN堆栈入门:创建基于MongoDB, ExpressJS, Angular的程序
- Axis2与Spring整合实现多WebService发布
- Cam Trax: Solidworks平台的专业凸轮设计工具
- 狂徒易语言+js逆向课程视频教程完整下载
- TP-R402M2011版固件升级:实现宽带速度限制功能
