ARM7+μC/OS-Ⅱ: 实现斜井防跑车控制器的创新设计
155 浏览量
更新于2024-09-03
收藏 275KB PDF 举报
本文档主要探讨了基于32位ARM7微处理器LPC2119和实时操作系统μC/OS-Ⅱ的斜井防跑车控制器的设计与实现。在当前我国对煤炭安全的高度重视背景下,斜井运输的安全问题尤为重要,尤其是防止因超载、失修等因素导致的跑车事故。传统的斜井跑车防护装置存在寿命短、维修量大、算法不灵活和抗干扰能力弱等问题,因此设计一个高效且可靠的解决方案显得尤为必要。
文章首先介绍了背景,指出32位ARM7微处理器LPC2119作为核心,μC/OS-Ⅱ则提供了实时操作系统支持,旨在克服现有设备的不足,实现更精确的速度监测、位置判断和自动化控制。控制器的核心功能包括通过传感器A和B监测矿车速度及行驶方向,传感器C负责确认机车的位置,而传感器E和F则监控挡车装置的状态。
硬件设计方面,防护装置由控制器、执行机构、挡车装置以及测速与到位传感器组成。当矿车正常行驶时,挡车装置会根据设定的速度自动开启和关闭。一旦发生异常,如跑车或脱钩,速度传感器会触发挡车装置闭合,以防止矿车失控下滑。控制器设计采用了LPC2119作为核心,配备了一个最小工作系统,包括11.0592MHz晶振和MAX708SD等外围元件,以确保系统的稳定性和可靠性。
此外,设计中强调了通过键盘设置防护速度,通常设定为不大于4m/s,这体现了对安全性的细致考虑。整个设计的目标是提高斜井运输的安全性,减少人为错误和设备故障的影响,从而保障矿工的生命安全和煤炭生产的连续进行。
总结来说,这篇文章深入探讨了如何运用现代微处理技术和实时操作系统来构建一个高效的斜井防跑车控制系统,以期在实际应用中提高煤矿运输过程中的安全保障水平。
基于基于ARM+μC/OS-Ⅱ的斜井防跑车控制器设计的斜井防跑车控制器设计
本设计提出了一种基于32位ARM 7微处理器LPC2119和实时操作系统μC/OS-Ⅱ的斜井防跑车装置控制器实现方
法。
1 引言
煤炭作为我国的基础能源,占到国内能源消费的近四分之三,在我国经济与社会发展中起着重要的作用。煤炭生产安全事关国
计民生,安徽省1966~2003年煤矿事故中,运输事故死亡750人,占17%。运输是煤矿生产的重要环节,从运输巷道的布置
情况来分,有立井、斜井、平巷3种运输形式。在斜井运输中,由于超载、失修、误操作等原因,发生提升车辆断绳、脱钩现
象,使运行的车辆沿斜井轨道向下的加速运动,即所谓的斜井跑车。煤矿安全规程规定:在斜井串车提升井巷中,必须安设能
够将运行中断绳、脱钩的车辆阻止住的跑车防护装置。
斜井提升跑车防护装置一般有传感器、控制器、执行机构和挡车器等几部分组成。其中正确灵敏地拾取跑车信号并发出控制指
令是跑车防护装置发挥作用的关键;现有的斜井跑车防护装置中有机械联锁原理的、PLC作为控制器的,电子电路作为控制器
的,存在着寿命短、维修量大、算法不灵活、抗干扰能力差等缺陷。本设计提出了一种基于32位ARM 7微处理器LPC2119和
实时操作系统μC/OS-Ⅱ的斜井防跑车装置控制器实现方法。
2 系统硬件设计
2.1 装置组成
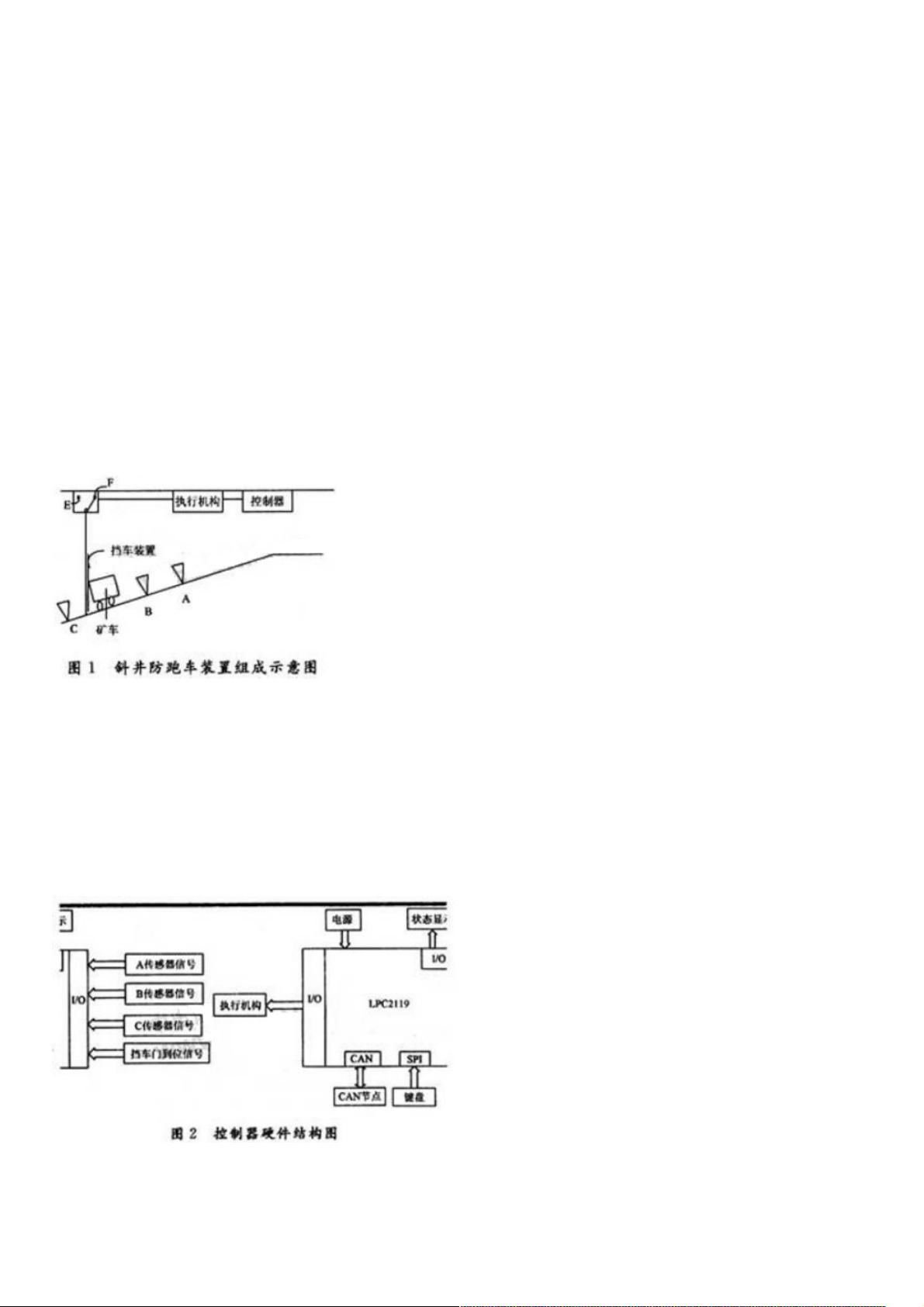
该防护装置是一种常闭型装置,由控制器、执行结构、挡车装置和测速与到位传感器构成。如图1所示。
传感器A,B完成矿车速度测定及方向识别,传感器C完成机车下行时发出放下挡车装置信号或机车上行时发出提起挡车装置
信号,传感器E,F分别用于检测挡车装置提升和下放到位信号。
当矿车以正常速度行车时,挡车装置自动开启让矿车通过,然后自动关闭挡车装置。当发生跑车或脱车等情况,由于速度异常
挡车装置闭合,将矿车挡住。
2.2 控制器设计
控制器通过传感器A,B获得机车速度,通过传感器C获得机车运行位置,并实时提升或放下挡车装置,通过传感器E,F获得
挡车装置位置信号。同时通过键盘设定防护速度,一般情况运行速度不大于4 m/s。本控制器以LPC2119为核心,由最小系
统、输入通道和输出通道等构成,其硬件结构图如图2所示。
(1)最小工作系统:最小工作系统以Philips公司的LPC2000系列ARM 7微控制器LPC2119为核心,采用11.059 2 MHz晶振,并
利用MAX708SD组成复位电路,它包含一个看门狗定时器、一个微处理器复位模块、一个供电失败比较器及一个手动复位输
入模块。系统电源采用78M05,LM1117-3.3,LM1117-1.8三种电路产生所需的工作电压。
(2)输出通道设计:本系统输出通道输出的信号为编码信号,符合MC145026编码规范,用于对执行机构的控制,为了隔离被
控对象对系统的干扰,采用光耦4N33进行隔离。输出通道如图3所示。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-06-01 上传
2024-09-16 上传
2024-09-16 上传
2024-09-16 上传
2024-09-16 上传

weixin_38735987
- 粉丝: 4
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
