Matlab双目标定与测距跟踪实验指南
下载需积分: 0 | DOCX格式 | 7.03MB |
更新于2024-08-04
| 153 浏览量 | 举报
"实验指导书 - 实验二 - 双目标定、测距、跟踪1"
在本次实验中,我们将深入探讨双目标定、测距和跟踪的概念与实践,使用MATLAB 2021a及以上版本作为主要工具。实验旨在让学生熟悉数字图像处理,掌握双目标定的过程以及特征点提取和匹配技术,同时学习如何利用这些技术进行目标距离的计算和跟踪。
双目标定是计算机视觉领域中的关键环节,它涉及两个不同视角的相机对同一场景的同步拍摄。在这个过程中,我们需要标定这两个相机,以便校正它们的内参和外参,消除失真。在MATLAB的StereoCameraCalibrator工具箱中,可以导入标定图像(通常是棋盘格图案),设定棋盘格大小,然后进行标定,最终保存结果。标定参数包括焦距、主点坐标和旋转向量等,它们对于后续的目标测距至关重要。
目标测距依赖于特征点提取和匹配。ORB(Oriented FAST and Rotated BRIEF)是一种快速且旋转不变的特征描述符,适用于图像匹配。在实验中,我们需要使用MATLAB的detectORBFeatures函数提取ORB特征点,然后进行双目匹配。匹配的特征点可以用来计算深度,即目标距离。平均深度可以通过匹配点的深度值计算得到,这有助于提高测距的准确性。
跟踪部分涉及对连续图像帧中的目标进行定位。在每帧图像中,我们提取ORB特征点,寻找前一帧与当前帧的对应匹配,以此来更新目标的边界框。如果匹配失败,可能需要重新框选目标或尝试不同的特征匹配策略。程序中的continue语句通常在特定条件不满足时使用,如特征点匹配不足或跟踪丢失,以跳过当前迭代并继续处理下一帧图像。若continue未被调用,程序将继续执行后续步骤,可能导致错误的跟踪结果。
为了计算每个点的三维坐标(X、Y、Z),我们需要结合标定参数和深度信息。标定后的相机模型可以将像素坐标转换为世界坐标。假设已知基线(两相机间的距离)、焦距以及像素坐标,通过立体几何关系,可以解算出点的X和Y坐标。具体公式可能涉及到相机坐标系到像素坐标系的转换,以及空间点到相机的相对位置计算。
实验步骤包括导入标定文件、读取图像、特征点提取与匹配、距离计算、特征点匹配以及目标跟踪更新。完成这些步骤需要对MATLAB编程和计算机视觉的基本原理有深入理解。通过这个实验,学生不仅能够掌握理论知识,还能提升实际操作技能,为未来更复杂的视觉应用打下坚实基础。
实验二、双目标定、测距、跟踪
一、实验目的
1、熟悉数字图像的基本处理方法、双目标定过程、特征点提取和匹配过程。
2、掌握使用 Matlab 读取图片、处理图片的方法。
3、了解双目测距和跟踪原理,掌握使用 Matlab 提取和匹配 ORB 特征点。
二、实验内容
要求:使用 Matlab2021a 版本以上软件,使用 Matlab 自带双目标定工具箱标定双目图
像,理解标定参数,使用标定参数计算目标距离。掌握使用 Matlab 提取和匹配 ORB 特征点,
并计算目标距离,使用匹配特征点跟踪目标。
1. 双目标定
(1) 打开 Stereo Camera Calibrator,导入标定图像,设置 size of checkerboard square
值。
(2) 标定并保存结果。
2. 目标测距和跟踪
(1) 对双目图像进行 ORB 特征点提取并生成特征向量,并匹配。
(2) 使用双目匹配点计算深度,求出平均深度。
(3) 对前后图像的特征点匹配,更新跟踪目标框。
三、使用仪器、材料
硬件:计算机;软件:Matlab2021a。
四、实验步骤
(一) 标定双目
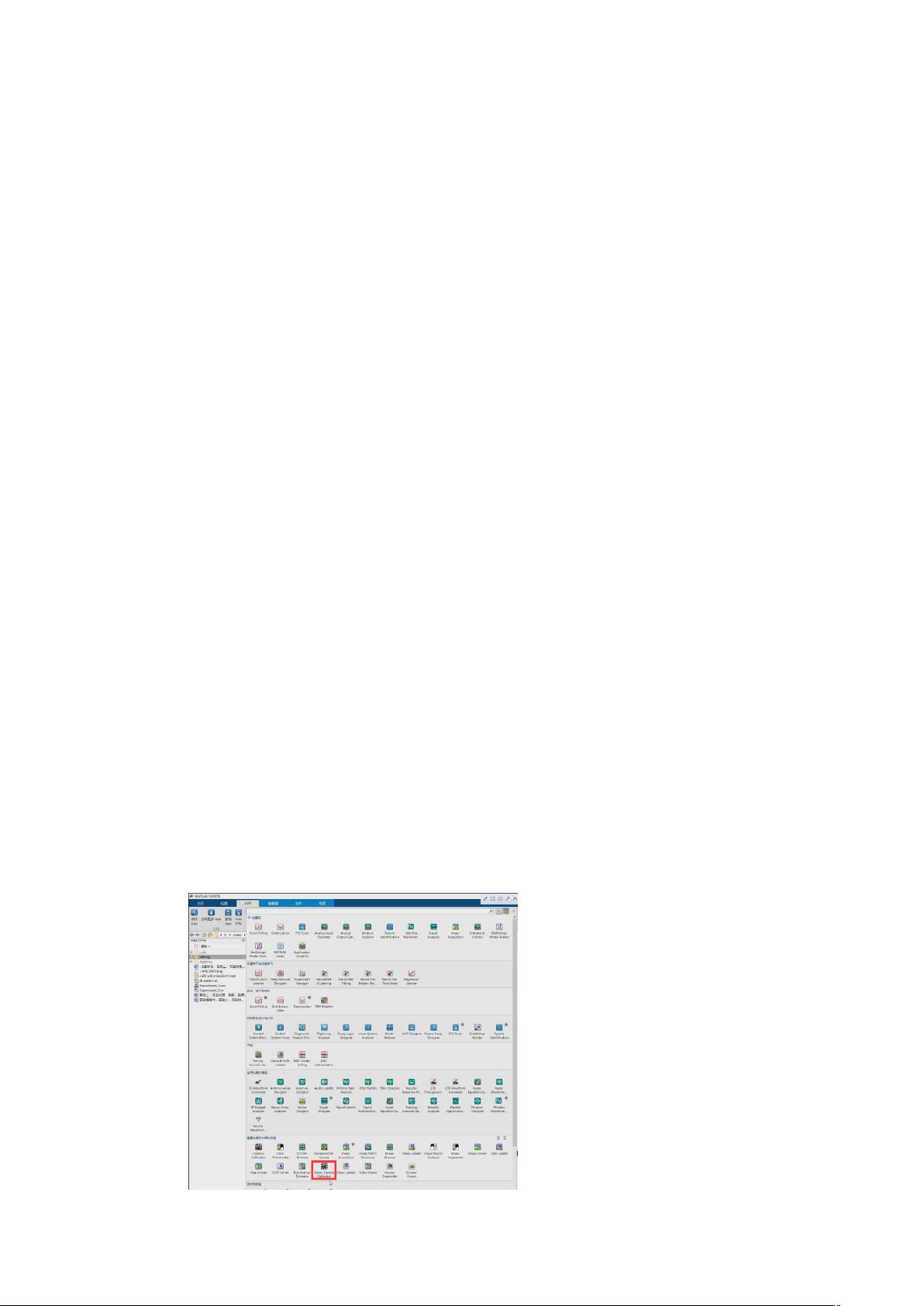
1. 打开软件 Matlab2021a。
2. 打开 Stereo Camera Calibrator。
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐







实在想不出来了
- 粉丝: 36
 我的内容管理
展开
我的内容管理
展开







最新资源
- 如何验证缓冲区UTF-8编码的有效性
- SSM框架整合开发视频教程
- WORD字处理第1套题目要求解析
- 《C程序设计(第四版)》谭浩强著课件精要
- PHPExcelReader:高效的PHP类读取Excel文件
- 恐惧极客挑战:Re-entry-VR体验带你领略废弃飞船逃生之旅
- 基于C#和SQL的酒店管理系统毕业设计完整项目
- C++实现图形化扫雷游戏设计与开发
- OctoPrint-FileManager插件:OctoPrint的简化管理工具
- VIVO BBK5.1.11版本刷机工具使用指南
- Python基础与应用教程及源代码解析
- 如何使用C/C++读取图片EXIF信息的详细步骤
- Guzzle基础教程:构建Web服务客户端指南
- ArcGIS地图SDK for Unreal引擎1.0.0发布
- 实现淘宝式图片放大镜效果的jQuery教程
- 小波神经网络纹理分类工具的研发与应用
