自旋电子忆阻器在PID控制器中的应用探索
111 浏览量
更新于2024-08-28
收藏 816KB PDF 举报
"nt of modern control technology, especially in the hardware realization of micro-control systems. The proposed spintronic memristor-based PID controller exhibits a compact design that potentially enhances control performance while reducing the size and power consumption of the control circuit.
自旋电子忆阻器(Spintronic Memristor)是基于磁学原理的一种新型忆阻器件,它在传统忆阻器的基础上引入了电流密度的概念。这种器件的电阻状态不仅受到历史电压和电流的影响,而且与流过器件的电流密度有直接关系。这一特性使得自旋电子忆阻器在信息存储和处理方面具有潜在优势,尤其是在高速、低功耗的应用场景。
首先,我们深入探讨了自旋电子忆阻器的数学模型。这个模型基于磁学理论,详尽地阐述了忆阻效应如何随时间和电流密度变化。忆阻效应是忆阻器的核心特性,它允许设备根据过去的电压和电流历史改变其电阻状态,从而实现非易失性存储。
为了更好地理解和模拟这种行为,我们构建了一个Simulink模型。Simulink是MATLAB环境下的一个图形化工具,用于系统级建模和仿真。这个模型能够帮助研究人员和工程师直观地理解自旋电子忆阻器的工作机制,并对其进行参数调整和性能评估。
接下来,我们探索了将自旋电子忆阻器应用于传统PID(比例-积分-微分)控制器的设计。PID控制器是工业自动化领域中最常用的控制算法之一,因其简单且有效而被广泛采用。然而,传统的PID控制器往往需要复杂的硬件电路,这可能导致体积大、功耗高。将自旋电子忆阻器集成到PID控制电路中,可以实现一种新型的紧凑型忆阻PID控制器,它可能显著减小控制器的物理尺寸,同时提高控制性能。
通过仿真研究,我们验证了这个新型忆阻PID控制器的可行性和效率。仿真结果表明,这种控制器在保持或提升控制精度的同时,能有效地降低系统的响应时间,这对于实时控制和能源效率要求高的应用至关重要。此外,由于自旋电子忆阻器自身的非线性特性,该控制器还有可能应对复杂的动态系统,提供更灵活和自适应的控制策略。
本研究对于自旋电子忆阻器在微控制器硬件实现中的应用提供了新的视角,尤其是在PID控制电路的优化和微型化方面。这些研究成果有望推动现代控制理论和技术的进步,特别是在嵌入式系统、物联网设备以及未来自适应智能系统等领域,自旋电子忆阻器的潜力不容忽视。"
A Spintronic Memristor Based PID Controller
Zhekang Dong
1
, Shukai Duan
1
, Xiaofang Hu
2
, Lidan Wang
1
, Fanyi Meng
1
1
School of Electronics and Information Engineering, Southwest University, Chongqing, 400715, China
2
Department of Mechanical and Biomedical Engineering, City University of Hong Kong, Kowloon, Hong Kong
Abstract—The spintronic memristor was proposed based
upon the magnetic theory shortly after the discovery of the
Hewlett-Packard (HP) TiO2 memristor. Different from
that of the TiO2 memristor, the resistance of a spintronic
memristor not only depends on the historic profile of
voltage and current through the device, but also is closely
related to the current density. In this work, we review the
mathematical model of the spintronic memristive device
based on magnetic theory and analyze its memristive
effects in detail. Then we provide a corresponding
Simulink model. Furthermore, by incorporating the
spintronic memristor into a conventional PID control
circuit, the paper investigates an implementation
approach for a novel compact memristive PID controller.
The findings of the study may contribute to further
development of the modern control technology, especially
in hardware realization of micro-control system. Finally,
reported simulations demonstrate the effectiveness of the
proposed scheme.
Keywords- spintronic memristor; PID control circuit;
micro-control system.
I. INTRODUCTION
In 1971, Professor Chua defined the relationship
between flux linkage and charge through a device based
on the symmetry arguments of circuit theory and thus
predicted the existence of the fourth fundamental circuit
element, called memristor [1]. In 2008, the first
realization of the memristor was illustrated in HP
Laboratory, which garnered increasingly extensive
interests from numerous researchers [2]. Soon later,
three possible structures of spintronic memristors were
proposed by Chen et al. [3, 4] in which the memristive
effect was obtained by the spin-torque-induced
magnetization switching or the magnetic-domain-wall
motion. Unlike the solid-state TiO
2
thin film device
presented in [2], the performance of the spintronic
memristor is more flexibly. Meanwhile, the magnetic
device can be integrated into CMOS devices with
exquisite technology and low cost [4]. As a promising
nano-electronic, the spintronic device captures a
number of unique properties that have found attractive
potentials in various fields, such as nonvolatile memory,
nonlinear circuit and system, neuromorphic system,
signal processing, control, and learning system etc
[5-7].
In the past several decades, the well-known
proportional-integral-derivative (short for PID)
controllers have been playing a significant role in the
modern industry control area [8]. There is a growing
popularity of PID controllers mainly on account of their
simplicity and superior dynamic performance.
Generally, the PID controllers, almost the linear fixed
gain PID controllers, are adequate for controlling a
physical process. The demands for high-performance
control with environmental parameters or operating
conditions varying are far beyond the capabilities of
common PID controllers [9, 10]. In this regards, many
effective and feasible approaches have been proposed,
which contain the self-tuning method, fuzzy logic,
general predictive control and neural networks strategy,
and so forth [11, 12]. In this paper, we introduce the
physical model of spintronic memristor, describe its
mathematical model and Simulink model accordingly,
and analyze the memristive characteristics according to
numerical simulation. Moreover, a spintronic memristor
takes the place of the linear resistor in the PID
controller circuit, in so doing, the memristance could be
adjusted flexibly with the transient current density
varying, as a result, the spintronic memristive device
realizes the tunable gain.
The rest of the paper is organized as below. In
Section II, the mathematical model and Simulink model
of the spintronic memristor based on
magnetic-domain-wall motion mechanism are presented.
The nonlinear adaptive PID controller based on
spintronic memristor (abbreviated to SM-PID controller)
is proposed in Section III. Next, the Section IV exhibits
the simulation results and corresponding analysis of
SM-PID controller. At last, the conclusions are given in
Section V.
II. T
HE SPINTRONIC MEMRISTOR MODEL
A. The mathematical model of spintronic memristor
Among various existing spintronic memristor
devices proposed in [4], the spintronic memristive
device based upon magnetic-domain-wall motion is a
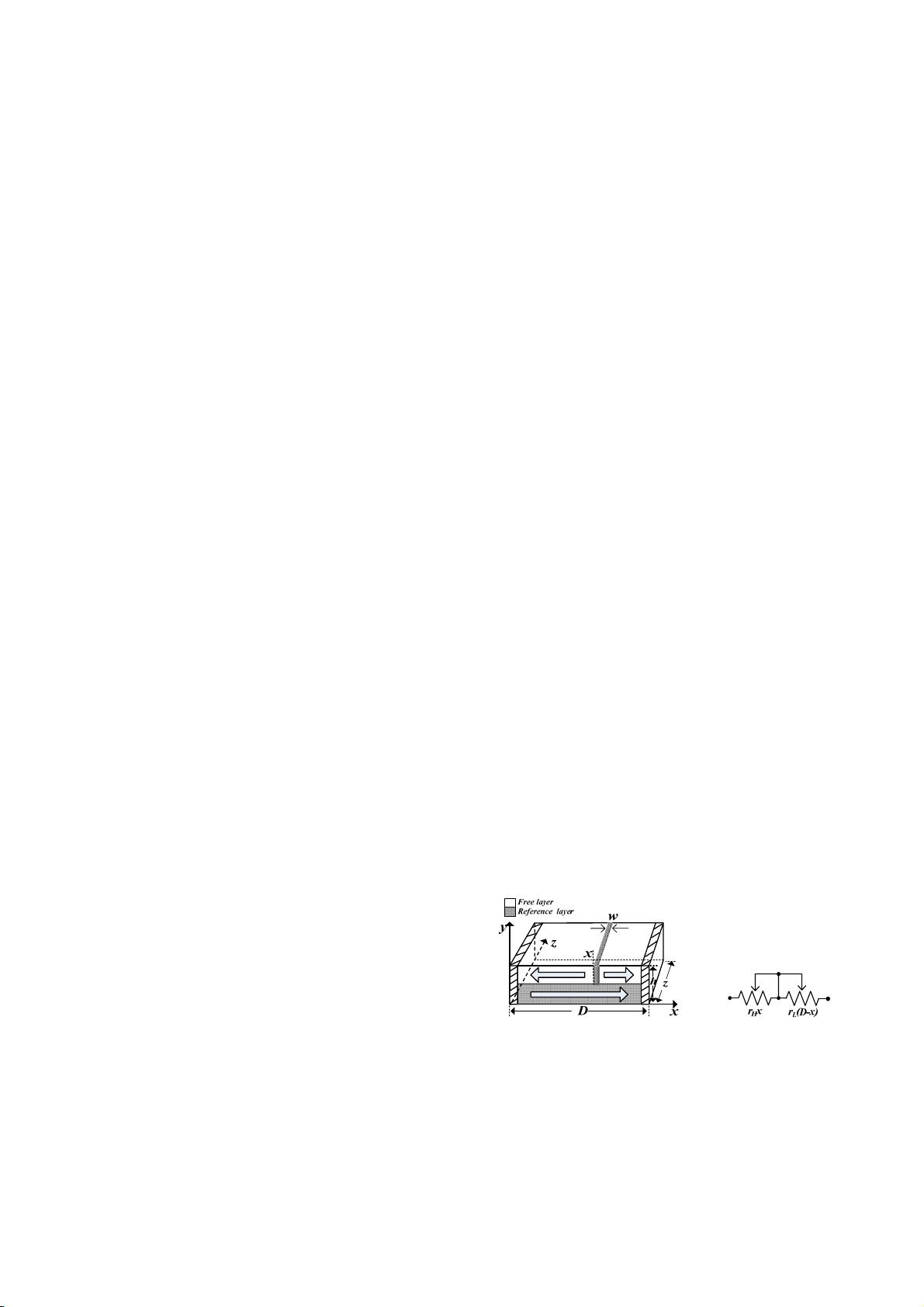
promising option for its simple structure. Fig. 1 shows
the physical structure of the spintronic memristor and
its corresponding simplified equivalent circuit.
(a) (b)
Figure 1. A spintronic memristor based on magnetic-domain-wall
motion. (a) 3 dimension structure. (b) equivalent simplified circuit.
As shown in Fig. 1(b), the total resistance of the
spintronic memristor,
)(xM
, is expressed as two
resistors connected in series:
)()( xDrxrxM
LH
−⋅+⋅
=
(1)
2015 AASRI International Conference on Industrial Electronics and Applications (IEA 2015)
© 2015. The authors - Published by Atlantis Press
280
下载后可阅读完整内容,剩余3页未读,立即下载
2021-02-26 上传
2021-09-25 上传
点击了解资源详情
2021-03-29 上传
2021-07-26 上传
2021-02-11 上传
2021-05-04 上传
2020-02-09 上传
2019-02-21 上传

weixin_38537684
- 粉丝: 3
- 资源: 864
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
