线性系统的可控性和可观测性学习教案深度剖析
版权申诉
2 浏览量
更新于2024-02-23
收藏 776KB PPTX 举报
线性系统的可控性和可观测性是控制工程领域中的两个重要概念,对于系统的稳定性和性能具有关键的影响。经典控制理论主要讨论SISO系统的输入输出分析和综合问题,其中控制量和输出信号之间的关系可以通过传递函数唯一确定,因此系统的可控性一般并不是一个问题。输出信号通常是可以直接测量的,否则就需要通过其他方式进行间接测量,以便进行反馈控制和评估系统的性能。因此,经典控制理论和技术往往不涉及系统是否可控或可观测的问题。
然而,现代控制理论更加注重对MIMO系统内部特性和状态的分析、优化和控制。在多输入多输出系统中,状态变量的维度通常高于输入向量的维度,因此存在着多维状态是否可由少维输入控制的问题。此外,有时系统的状态变量并不是直接可测或间接可测的,因此需要考虑如何利用可测或观测的输入输出信息来构建系统状态。这就引入了对系统可观测性的讨论,即系统是否能够通过测量的输出信息来确定其内部状态。
可控性和可观测性是现代控制理论中的两个关键概念,它们决定了系统是否能够被有效地控制和监测。可控性指的是系统是否能够在有限时间内从任意初始状态到达任意目标状态,即系统的状态可以通过适当的控制输入实现任意的状态转移。可观测性则是指系统的内部状态是否可以通过测量的输出信息完全确定,以便进行状态估计和反馈控制。
在实际应用中,可控性和可观测性的分析对于设计和调整控制系统至关重要。如果系统不是可控或可观测的,就很难实现所期望的控制目标,控制系统的性能可能会受到限制甚至出现不稳定的情况。因此,工程师们需要通过合适的方法和工具对系统进行可控性和可观测性的分析,以确保系统的稳定性和性能满足设计要求。
总的来说,线性系统的可控性和可观测性是控制工程中的基础概念,对于系统的设计、分析和调整都具有至关重要的意义。通过对系统进行可控性和可观测性的深入研究,工程师们可以更好地理解系统的内部结构和动态特性,从而设计出稳定性能优良的控制系统。
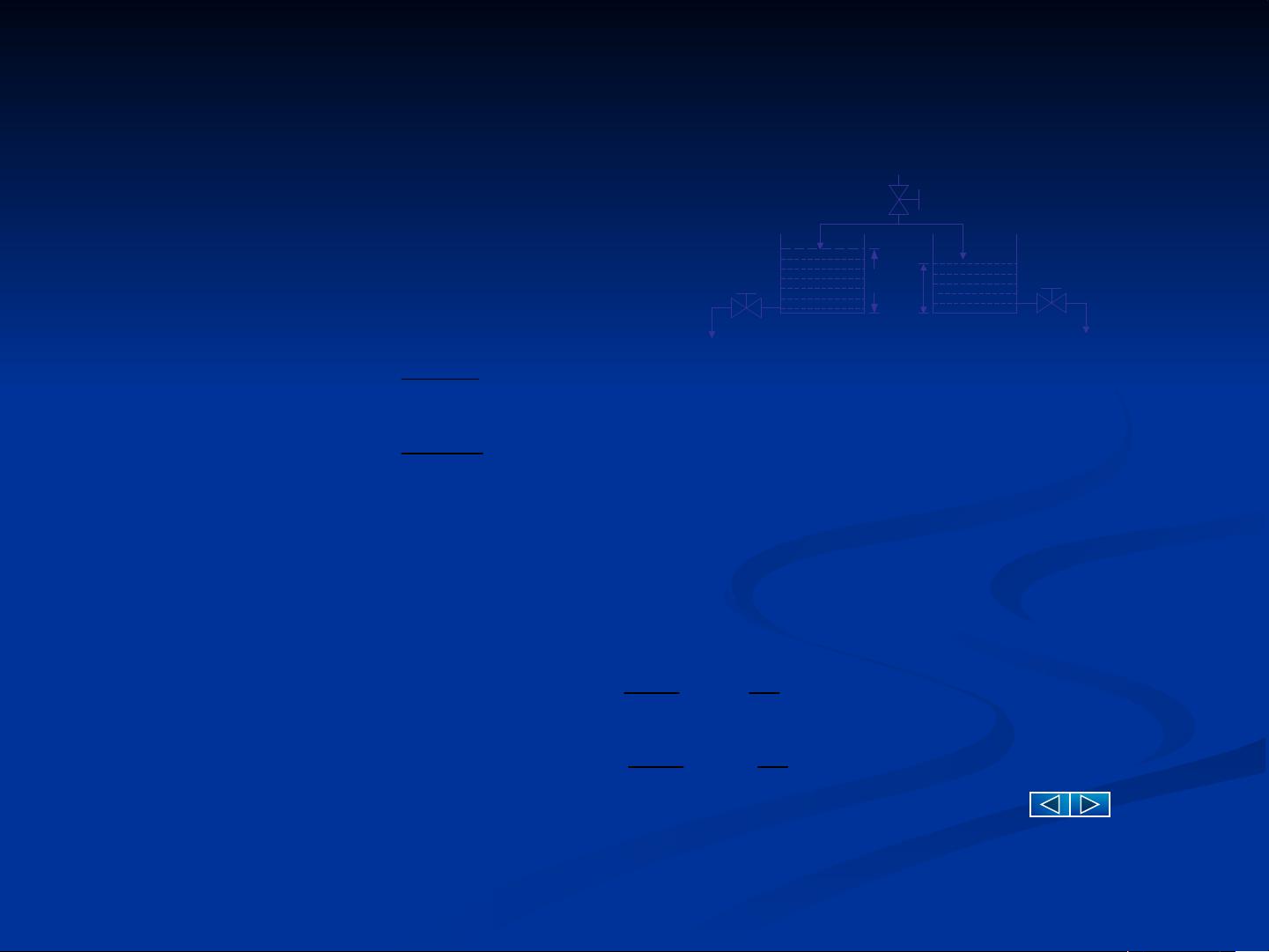
由各水槽中所盛
水量的平衡关
系和流量与压
力 ( 水面高度 )
的关系 , 有
其中代表平衡工作点附近的变化量。选上述方程中变化量h1和 h2为状态变量 ,将状态变量带入方程中并消去中间变量Q1 和Q2 消去 ,则有
第 11 页 / 共 110 页
222
2
111
1
/
d
d
/
d
d
QRhQQ
t
h
A
QRhQQ
t
h
A
O
O
1
Q
1
O
h
1
h
2
Q
2
Q
O
Q
O
2
o
o
Q
A
x
AR
x
Q
A
x
AR
x
11
11
22
11

剩余63页未读,继续阅读
2021-10-04 上传
2021-10-05 上传
2021-10-05 上传
2021-10-04 上传
2021-10-05 上传
2021-10-02 上传

加油学习加油进步
- 粉丝: 1401
- 资源: 52万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
