改进的高斯拉普拉斯边缘检测:提升车辆视频识别准确性
需积分: 9 60 浏览量
更新于2024-09-16
2
收藏 386KB PDF 举报
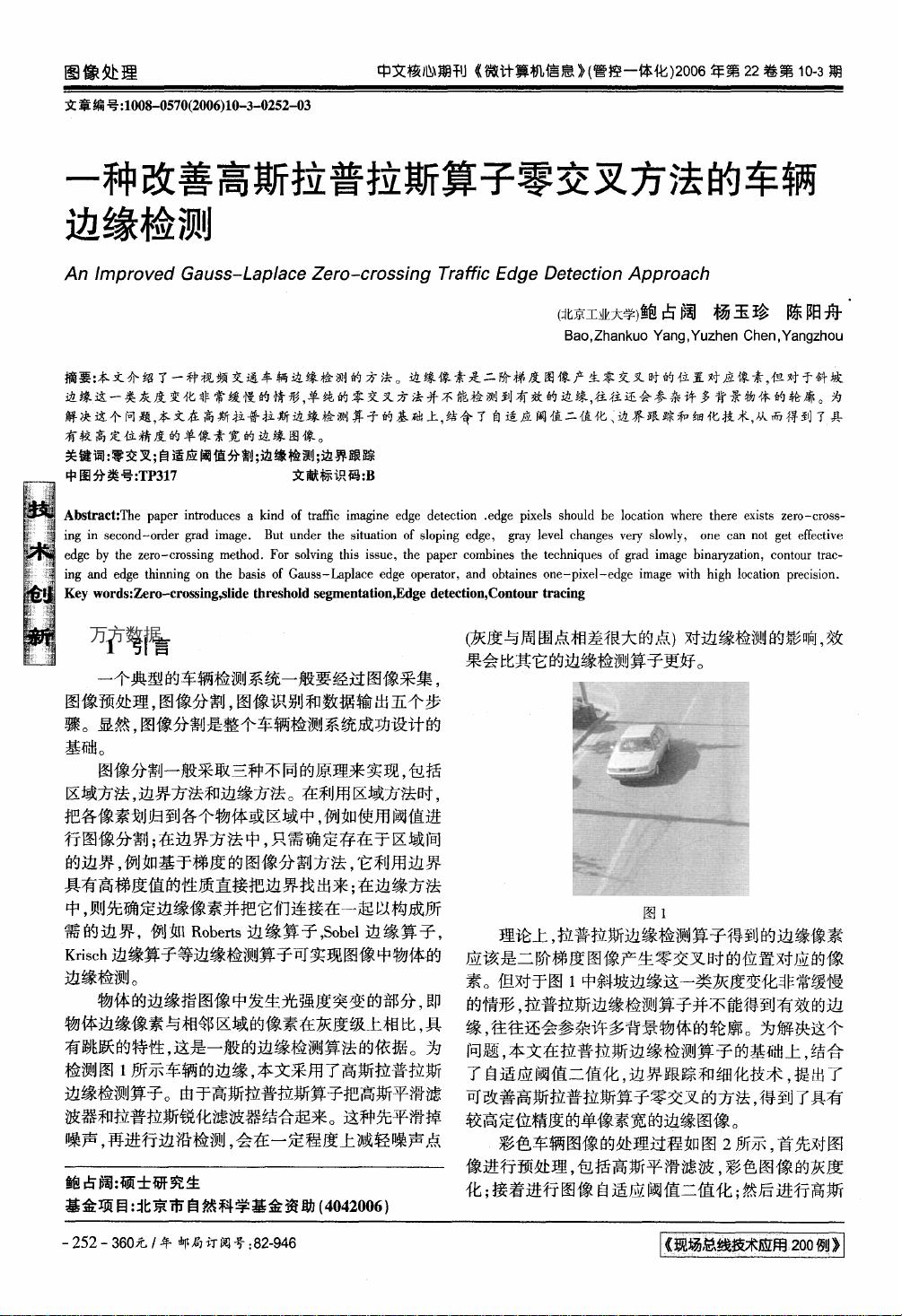
本文主要探讨的是车辆边缘检测的一种改进方法,针对高斯拉普拉斯算子在处理视频交通场景中的局限性。在传统的图像处理中,边缘检测是通过寻找图像灰度值变化的显著位置来确定对象的轮廓。高斯拉普拉斯算子是一种广泛用于边缘检测的算子,它通过对图像进行一阶导数的加权求和,突出图像中的边缘区域,因为边缘通常伴随着局部灰度梯度的急剧变化。
然而,当遇到斜坡边缘这种灰度变化较为平缓的情况时,单纯依赖零交叉(即灰度值的正负交替)来检测边缘可能会失效,因为这类边缘的灰度级变化不明显,导致边缘检测结果可能混杂有背景物体的边缘噪声。为了解决这个问题,研究者提出了一种创新的边缘检测策略。
该方法首先在高斯拉普拉斯算子的基础上进行改进。作者引入了自适应阈值分割技术,这种方法能够根据图像局部的统计特性动态调整阈值,更准确地分离出边缘与背景。这意味着边缘像素的选择不仅基于零交叉,还考虑了灰度变化的相对强度,提高了边缘检测的鲁棒性。
接下来,边界跟踪技术被应用,以进一步细化边缘信息并减少噪声。通过连续跟踪边缘像素,算法可以确定边缘的完整路径,避免孤立的噪声点被视为边缘。这有助于提高边缘定位的精度,使得边缘图像更加清晰且具有单像素宽度,这对于后续的图像分析和识别至关重要。
此外,细化技术进一步优化了边缘图像,确保边缘的清晰性和边缘检测结果的完整性。细化操作会去除噪声点,同时保持边缘的连续性,使得边缘检测的结果更加符合实际的车辆轮廓。
这篇论文介绍了一种结合了自适应阈值分割、边界跟踪和细化技术的高斯拉普拉斯边缘检测方法,尤其适用于交通场景中斜坡边缘的精确检测。这种方法对于视频监控系统中的车辆检测、行为识别以及道路安全分析等应用具有重要意义,提升了边缘检测的性能和准确性。
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载
2022-06-29 上传
2011-03-18 上传
2021-03-17 上传
2022-07-14 上传
2021-04-23 上传
2021-10-02 上传
2022-09-23 上传

minidevilx
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
