自动驾驶核心技术:路径规划与避障策略
版权申诉
"自动驾驶技术之路径规划"
在自动驾驶技术中,路径规划是至关重要的一个环节,它关乎着无人车能否安全、高效地从起点到达终点。路径规划通常指的是全局路径规划,这一过程涉及到从车辆的起始位置到目标位置之间设计出一条无碰撞的几何路径,不考虑具体的时间序列和车辆的动力学特性。这种规划方法主要关注路径的效率和可行性,而忽略了行驶过程中的实时变化。
避障规划,又称为局部路径规划或动态路径规划,它的主要任务是对周围环境进行实时监控,检测并追踪障碍物。通过Moving Object Detection and Tracking (MODAT) 技术,无人车能够预测障碍物的未来可能位置,进而调整路径以避免碰撞。这一过程需要高速的传感器数据处理和强大的计算能力,因为它必须在短时间内完成,以确保行车安全。随着V2X(车与车通信,车与基础设施通信)技术的发展,避障规划将变得更加复杂且精准,可以极大地减少主动碰撞的可能性。
轨迹规划,虽然有时被混淆为避障规划,但它实际上是在路径规划和避障规划基础上的深化。轨迹规划不仅要考虑路径的几何形状,还要考虑到车辆的实际运动特性,如纵向加速度和横向角速度。此外,它还需要考虑到时间序列,确保车辆在行驶过程中平稳舒适。对于具有主动悬挂系统的车辆,轨迹规划还需考虑路况,以优化驾驶体验。
自动驾驶领域的路径规划、避障规划和轨迹规划涉及多种算法,包括但不限于A*算法、Dijkstra算法、RRT(快速探索随机树)算法、模型预测控制等。这些算法各有优缺点,适用于不同的场景和需求。例如,A*算法因其高效的寻路性能常用于全局路径规划,而RRT算法则适用于动态环境中的实时路径更新。同时,模型预测控制则能够结合车辆动力学模型进行精细化的轨迹规划。
为了实现这些复杂的规划任务,自动驾驶车辆通常配备了各种传感器,如雷达、激光雷达(LiDAR)、摄像头等,用于环境感知;同时也依赖于高精度地图和先进的定位系统,如GPS和惯性测量单元(IMU),以获取准确的位置信息。此外,强大的中央处理单元(CPU)和图形处理单元(GPU)则是实现高效计算的基础。
总体来说,自动驾驶技术中的路径规划是一个多层面、多维度的问题,需要综合运用各种算法和技术,以确保无人车在复杂多变的环境中能够安全、智能地行驶。随着技术的不断进步,未来的自动驾驶将更加智能化,路径规划也将变得更加精确和灵活。
自动驾驶技术之路径规划自动驾驶技术之路径规划
无人车的技术路线实际早已确定,那就是轮式机器人的技术路线。这已经从2007年的DARPA大赛到谷歌福特百
度的无人车,超过十年的验证,轮式机器人技术完全适用于无人车。目前所有无人车基础算法的研究都源自机
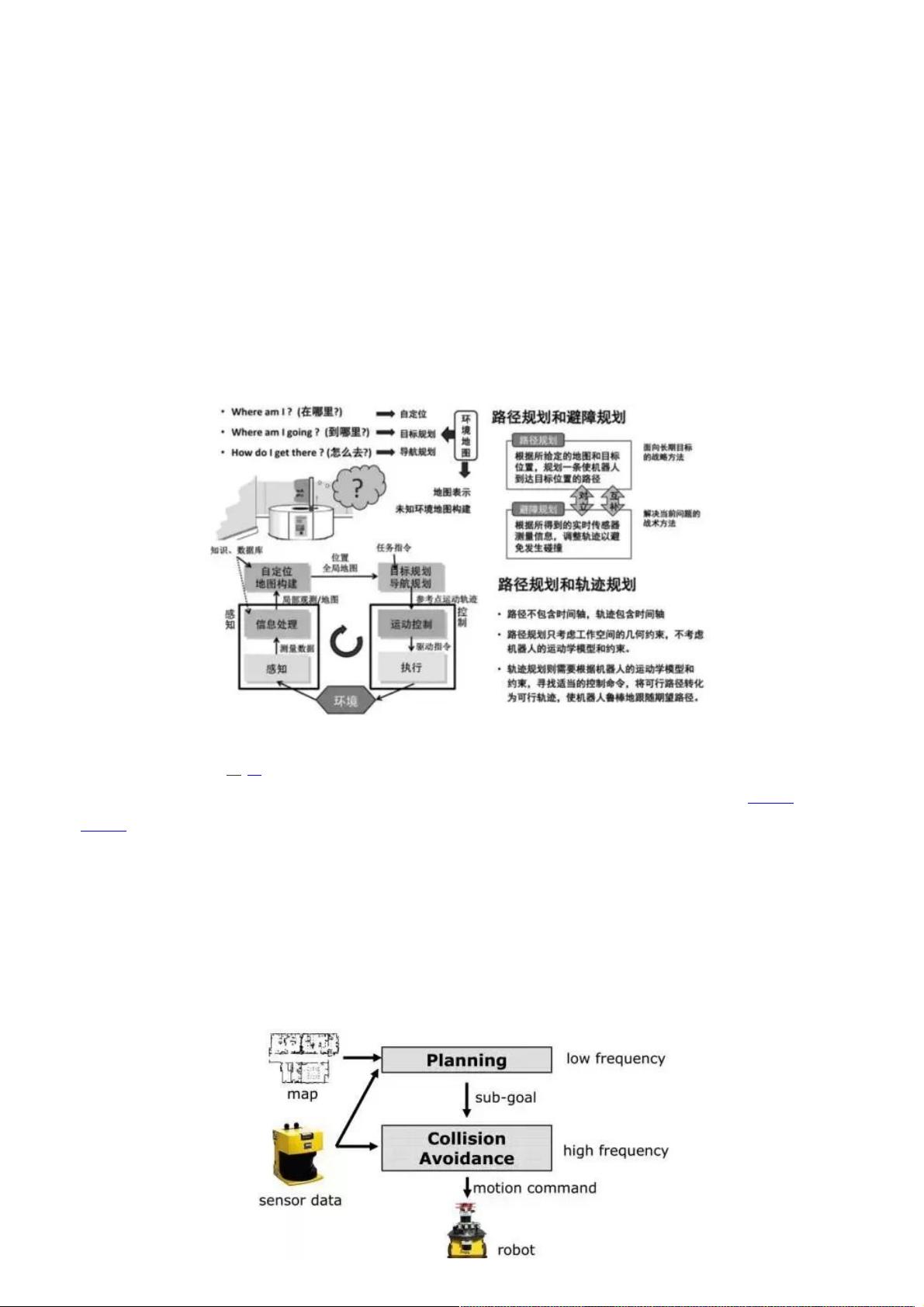
器人技术。 首先来说明三个概念,路径规划、避障规划、轨迹规划。路径规划通常指全局的路径规划,也可以
叫全局导航规划,从出发点到目标点之间的纯几何路径规划,无关时间序列,无关车辆动力学。 避障规划又叫
局部路径规划,又可叫动态路径规划,也可以叫即时导航规划。主要是探测障碍物,并对障碍物的移动轨迹跟
踪(Moving Object DetecTIon a
无人车的技术路线实际早已确定,那就是轮式机器人的技术路线。这已经从2007年的DARPA大赛到谷歌福特百度的无人
车,超过十年的验证,轮式机器人技术完全适用于无人车。目前所有无人车基础算法的研究都源自机器人技术。
首先来说明三个概念,路径规划、避障规划、轨迹规划。路径规划通常指全局的路径规划,也可以叫全局导航规划,从出
发点到目标点之间的纯几何路径规划,无关时间序列,无关车辆动力学。
避障规划又叫局部路径规划,又可叫动态路径规划,也可以叫即时导航规划。主要是探测障碍物,并对障碍物的移动轨迹
跟踪(Moving Object DetecTIon and Tracking ,一般缩写为MODAT)做出下一步可能位置的推算,终绘制出一幅包含现
存碰撞风险和潜在碰撞风险的障碍物地图,这个潜在的风险提示是100毫秒级,未来需要进一步提高,这对传感器、算法的效
率和处理器的运算能力都是极大的挑战,避障规划不仅考虑空间还考虑时间序列,在复杂的市区运算量惊人,可能超过
30TFLOPS,这是无人车难度较高的环节。未来还要加入V2X地图,避障规划会更复杂,加入V2X地图,基本可确保无人车不
会发生任何形式的主动碰撞。
轨迹规划则源自机器人研究,通常是说机械臂的路径规划。在无人车领域,轨迹规划的定义感觉不统一。有人将避障规划
与轨迹规划混淆了。轨迹规划应该是在路径规划和避障规划的基础上,考虑时间序列和车辆动力学对车辆运行轨迹的规划,主
要是车纵向加速度和车横向角速度的设定。将设定交给执行系统,转向、油门、刹车。如果有主动悬挂,那么轨迹规划可能还
要考虑地形因素。
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-20 上传
2021-09-20 上传
2024-10-23 上传
2024-03-05 上传
2021-09-20 上传
2021-10-02 上传

weixin_38552292
- 粉丝: 6
- 资源: 894
 我的内容管理
展开
我的内容管理
展开







最新资源
- validador-cpf-itau-turma15a
- c,c语言飞行棋源码,c语言项目
- Python 一些实用代码片段
- 用LED数码显示数字5_单片机C语言实例(纯C语言源代码).zip
- NiwaaSan Live Extension-crx插件
- FizzBuzzTestJUnit:为 JUnit 自动化测试创建的存储库
- cadQuery2:用cadQuery2编写的模型
- hands-on-2021:2021年动手项目会议
- Session-server:Session 鉴权服务
- Shubhanvi_Sanv
- Student,c语言源码万年历,c语言项目
- 基于Python编写的类ATM机系统,功能比较全面,适合编程思维训练
- 非响应式绿灰清新.zip
- reproschema:标准化的表单生成和数据收集方案,通过跨项目设计来协调结果
- 规划扑克
- Автоудар для НБК-crx插件
