深度学习目标检测技术变迁:R-CNN系列解析与挑战
170 浏览量
更新于2024-08-28
收藏 1.21MB PDF 举报
深度学习的目标检测技术演进,主要围绕R-CNN系列算法进行展开,这些算法在Object Detection(目标检测)领域扮演了关键角色。Object Detection的目标是确定图像中特定物体的位置并识别其类别,这是一个复杂且具有挑战性的任务,因为物体的尺寸、角度、姿态以及在图像中的分布都可能变化多样,且存在多类别对象的情况。
最初的R-CNN(Region-based Convolutional Neural Network)方法,它依赖于两步流程:首先通过选择候选区域(Region Proposal),然后对每个候选区域进行卷积神经网络的特征提取和分类。这种方法虽然精确,但计算成本较高,因为每个候选区域都需要独立处理。
为了提高效率,Fast R-CNN引入了共享卷积特征的方法,使得特征提取过程只进行一次,然后应用于所有候选区域,显著减少了计算量。这一步骤中,通过ROI Pooling技术统一处理不同大小和比例的区域,简化了后续的分类和回归。
Faster R-CNN在此基础上进一步优化,引入了RPN(Region Proposal Network),它是一个轻量级的神经网络,能够直接生成高质量的候选区域,无需预先选择。这个创新降低了R-CNN系列的整体复杂度,同时保持了较高的检测精度。RPN与Fast R-CNN共享特征提取网络,然后分别进行分类和回归,形成了所谓的“one-stage”检测模型。
R-CNN、Fast R-CNN和Faster R-CNN的演进历程展示了深度学习如何逐渐解决Object Detection中的定位问题,从最初的两阶段分类和定位,到共享特征的引入,再到一体化的候选区域生成,每一步都在提高速度和准确性。这些技术的发展不仅推动了计算机视觉领域的进步,也为许多实际应用,如自动驾驶、图像搜索和安防监控等提供了强大的工具。
步骤4:
1.预测阶段把2个头部拼上
2.完成不同的功能
这里需要进行两次fine-tuning
第一次在ALexNet上做,第二次将头部改成regression head,前面不变,做一次fine-tuning
Regression的部分加在哪?
有两种处理方法:
1.加在最后一个卷积层后面(如VGG)
2.加在最后一个全连接层后面(如R-CNN)
regression太难做了,应想方设法转换为classification问题。 regression的训练参数收敛的时间要长得多,所以上面的网络采
取了用classification的网络来计算出网络共同部分的连接权值。
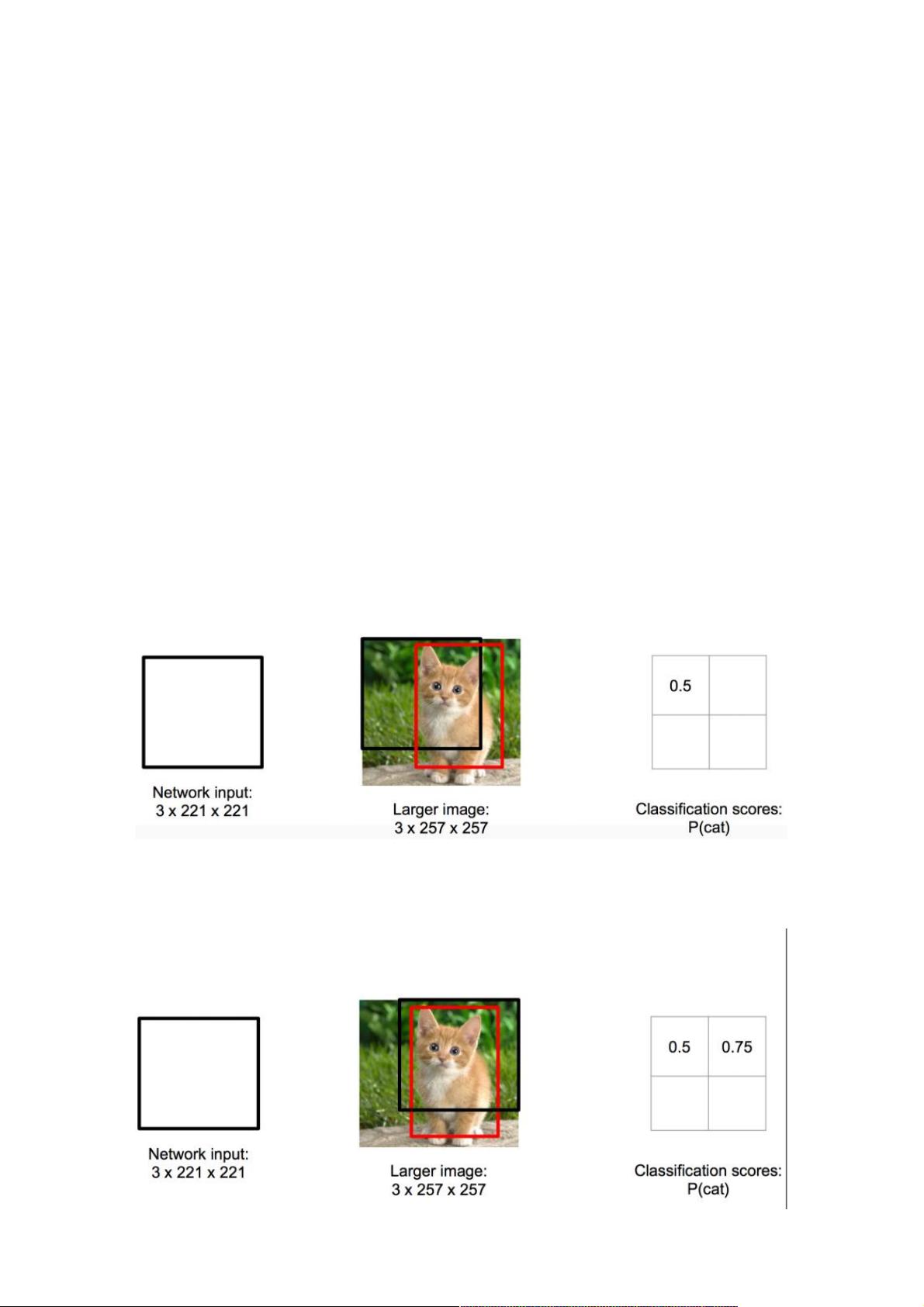
思路二:取图像窗口
1.还是刚才的classification + regression思路
2.咱们取不同的大小的“框”
3.让框出现在不同的位置,得出这个框的判定得分
4.取得分最高的那个框
左上角的黑框:得分0.5
右上角的黑框:得分0.75
左下角的黑框:得分0.6
剩余11页未读,继续阅读
2022-08-04 上传
2022-08-04 上传
2022-08-03 上传
2023-07-17 上传
2023-09-16 上传
2023-05-10 上传
2023-07-20 上传
2023-05-24 上传
2023-07-14 上传

weixin_38571544
- 粉丝: 3
- 资源: 895
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新代数控API接口实现CNC数据采集技术解析
- Java版Window任务管理器的设计与实现
- 响应式网页模板及前端源码合集:HTML、CSS、JS与H5
- 可爱贪吃蛇动画特效的Canvas实现教程
- 微信小程序婚礼邀请函教程
- SOCR UCLA WebGis修改:整合世界银行数据
- BUPT计网课程设计:实现具有中继转发功能的DNS服务器
- C# Winform记事本工具开发教程与功能介绍
- 移动端自适应H5网页模板与前端源码包
- Logadm日志管理工具:创建与删除日志条目的详细指南
- 双日记微信小程序开源项目-百度地图集成
- ThreeJS天空盒素材集锦 35+ 优质效果
- 百度地图Java源码深度解析:GoogleDapper中文翻译与应用
- Linux系统调查工具:BashScripts脚本集合
- Kubernetes v1.20 完整二进制安装指南与脚本
- 百度地图开发java源码-KSYMediaPlayerKit_Android库更新与使用说明
