圆点博士小四轴电路详解与关键组件
需积分: 50 134 浏览量
更新于2024-09-11
收藏 160KB PDF 举报
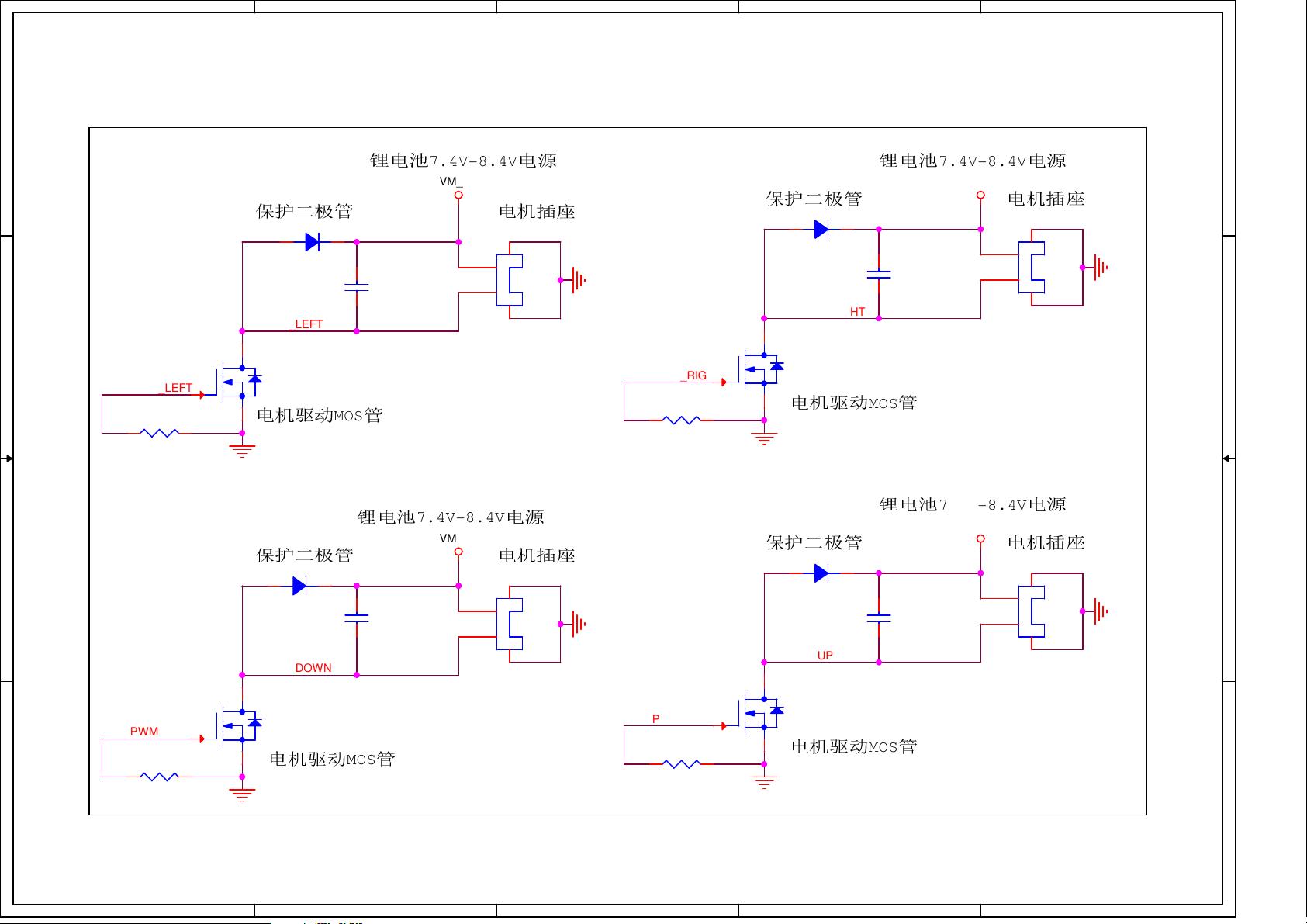
圆点博士小四轴原理图是一份详细的电路设计图纸,主要适用于小型四轴飞行器,特别关注于电机驱动和电源管理部分。该电路图展示了BS2015+版小四轴无人机结构的关键组件,包括但不限于:
1. **硬件构成**:
- 图中的“圆圆圆圆”代表多旋翼布局,表明这是一个标准的小型四轴飞行器,由四个电机(M1至M4)驱动,每个电机对应一对桨叶。
- 电路板上的元器件如D、Q2至Q14是逻辑控制单元,可能采用SI2302等电机驱动芯片,用于接收PWM信号来精确控制电机转速。
- 电池连接(锂电锂7.4V-8.4V)和电压监控(VM_A, VM_B)确保供电稳定,并有适当的保护电路,如IN5817作为保护二极管。
- 滤波电容(C1-C25)有助于平滑电流波动,提高电路稳定性。
- 电源接口如VIN_LEFT和PWM_LEFT等,以及地线(GND)标识出输入和输出端口。
2. **通信接口**:
- 2.4GHz NRF24L01+模块用于无线通信,可能支持2.4GHz频段的无线遥控或数据传输。
- SDA_SENSOR, SCL_SENSOR, INT_SENSOR等引脚表示传感器接口,可能是连接飞控系统或其他外部传感器的接口。
- SWD接口用于调试和编程,SWD下下下下下下可能用于连接调试工具进行软件更新。
3. **电源管理**:
- USB接口用于充电和数据传输,USB_D+、USB_D-和USB_CON分别表示数据线和电源线。
- 3V3和5V电源轨提供不同电压供电路板内部元件使用,3V3_EXT可能是一个外部电压源。
4. **注意事项**:
- 电路设计遵循了串行通信原则(串串串串串串),确保信号的有效传输。
- SWD和USB接口之间通过特定的接线方式(SWD下下下用通USB通串接接接通用用用用如如)进行连接和兼容。
综上,圆点博士小四轴原理图提供了构建一个功能齐全的小型无人机所需的电气设计细节,对于DIY爱好者和专业人员来说,理解和实施这些设计要素是构建和调试此类设备的基础。
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
BS2015+
电电电电
电电电电
电电电电
电电电电
保保保保保
保保保保保
保保保保保
保保保保保
电电电电
MOS
保
电电电电
MOS
保
电电电电
MOS
保
电电电电
MOS
保
锂电锂
7.4V-8.4V
电电 锂电锂
7.4V-8.4V
电电
锂电锂
7.4V-8.4V
电电
锂电锂
7.4V-8.4V
电电
PWM_LEFT
VIN_LEFT
PWM_RIGHT
VIN_RIGHT
PWM_DOWN
VIN_DOWN
PWM_UP
VIN_UP
VM_A VM_A
VM_B
VM_B
D2 IN5817
D7 IN5817
R24 100K
Q2
SI2302
C25
0.1uF
R4 100K
Q4
SI2302
R5 100K
M3
1
2
1314
M1
1
2
1314
C24
0.1uF
D1 IN5817
M4
1
2
1314
C1
0.1uF
D8 IN5817
Q13
SI2302
R22 100K
C2
0.1uF
M2
1
2
1314
Q14
SI2302
下载后可阅读完整内容,剩余6页未读,立即下载
2008-11-22 上传
2022-07-15 上传
2022-05-03 上传
2019-09-05 上传
2018-06-24 上传
2021-07-16 上传
2021-06-27 上传

fly0007
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
