大型桁架桥检车主动振动控制策略研究
版权申诉
136 浏览量
更新于2024-06-19
收藏 1.9MB PDF 举报
本文主要探讨了大型桁架式桥梁检测车的主动减振技术,针对该类车辆在执行桥梁检测任务时面临的振动问题进行深入研究。桥梁检测车因其需要将人员送到桥底,形成一个长的钢结构平台,使得车身和工作平台在工作人员活动、桥梁振动及风载荷等外部因素作用下容易产生显著的振动。这种振动不仅影响平台的稳定性,也降低了工作人员的工作舒适度。
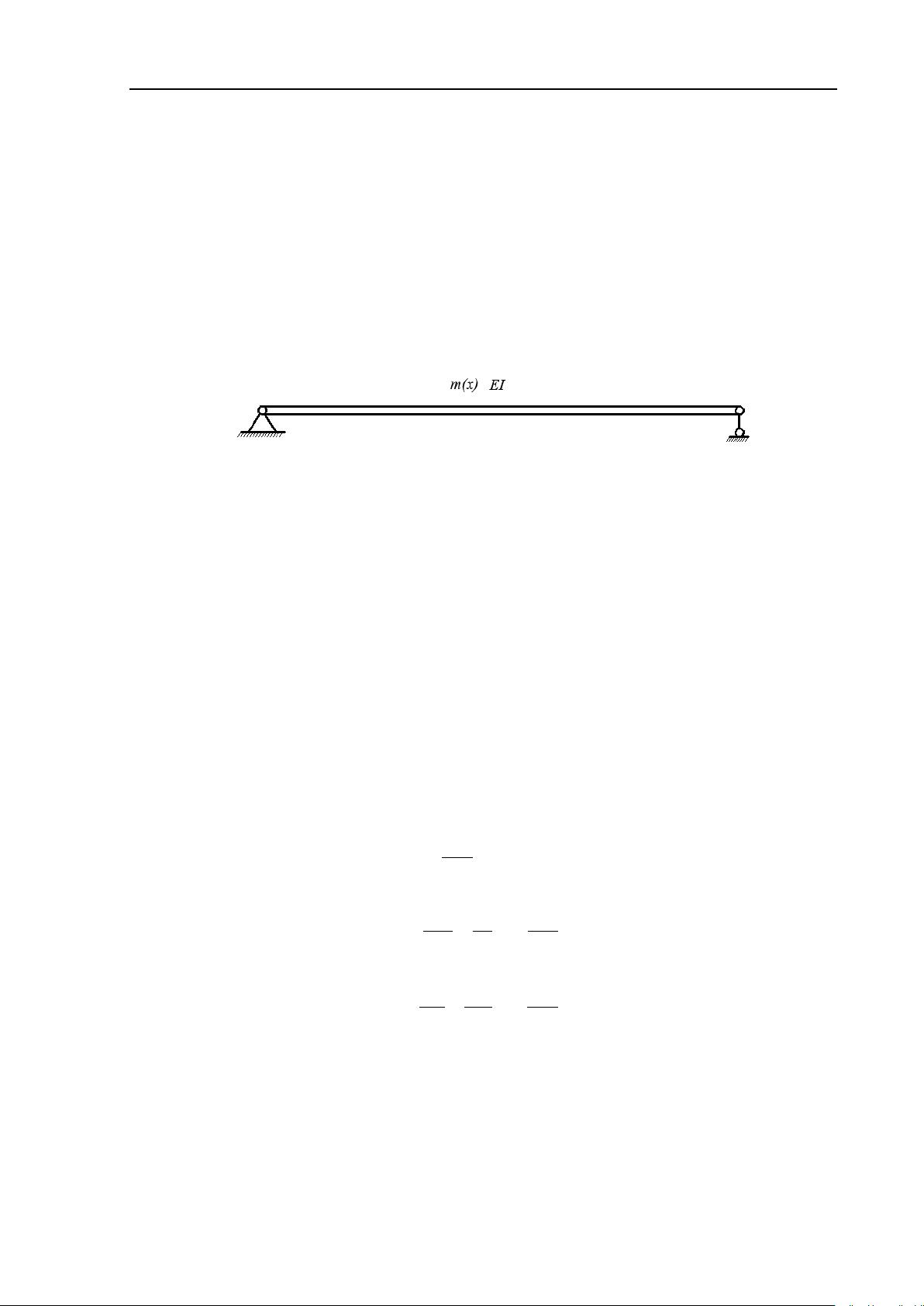
首先,论文基于欧拉-伯努利梁假设,简化桥梁模型,并通过Matlab构建桥梁跨中振动的力学模型,分析匀速行驶车辆对桥梁产生的广义力,从而得到了桥梁的响应曲线。通过这种方法,作者展示了车辆运动对桥梁振动的影响。
接着,文章采用PID控制算法设计主动悬架系统。通过微分方程形式的悬架动力学方程,利用拉普拉斯变换计算传递函数,并利用Simulink模拟了无控制情况下车身的振动响应。通过调整PID控制器的比例、积分和微分增益系数,成功地减小了车身振动,展示了主动悬架的有效性。
进一步,研究者考虑了工作平台的复杂性,通过离散化方法简化力学模型,并对行人载荷和风载荷进行了模型简化。使用Matlab分别计算了行人和风载荷对桁架振动的影响。这些分析有助于更好地理解不同外界因素对平台振动的影响。
最后,论文引入了LQR控制算法,用于优化工作平台的主动减振控制。作者通过建立考虑主控力的力学方程,计算出反馈增益矩阵,并设计了Kalman滤波器来求解卡尔曼滤波增益。利用LQG控制算法在Simulink中搭建了行人激励和风激励下的振动控制仿真模型。通过与无控制状态下的振动响应对比,结果显示了LQG控制对于降低工作平台振动的显著效果。
这项研究为提升大型桁架式桥梁检测车的动态性能和工作环境稳定性提供了有效的振动控制策略,结合了PID、LQR和LQG等多种控制技术,为实际工程应用提供了有价值的参考。通过数值仿真和对比分析,证明了主动减振技术在桥梁检测车中的必要性和实用性。

第一章 绪论
9
程;简化行人载荷的模型,用 MatLab 分别计算出行人在桁架各段行走所产生的振动
响应;计算出脉动风对桁架的载荷,用 MatLab 计算出桁架在风载荷下的振动响应。
第五章,用主动质量阻尼减振(AMD)对第四章所研究的桥梁检测车桁架的振动进
行抑制。根据公式选定被动调谐质量阻尼器的相关参数;建立有行人激励的振动控制
的力学方程;确定 LQR 控制算法下的反馈增益矩阵 K;用 MatLab 分别计算出系统在
LQR 控制算法下竖直方向和水平方向的振动响应以及主控力时程曲线;设计 Kalman
滤波器,求出卡尔曼滤波增益;根据 LQG 控制算法用 Simulink 分别建立桁架在行人
激励和脉动风激励下的振动控制仿真模型;求出 LQG 控制算法下系统的振动响应。
结论与展望。总结了本文的主要研究内容,指出了文中的创新之处和不足之处;
展望以后的工作。

剩余85页未读,继续阅读
2023-10-30 上传
2023-10-27 上传
150 浏览量
2021-09-21 上传
2024-04-02 上传
2023-04-10 上传
124 浏览量


xox_761617
- 粉丝: 29
 我的内容管理
展开
我的内容管理
展开







最新资源
- S3C2410X官方用户手册(1.2版):32位RISC微处理器详述
- 搭建jsp项目开发环境:JDK、Tomcat、MSSQL、Eclipse与MyEclipse
- PetShop4.0中文详解:ASP.NET 2.0架构优化与.NET Framework 2.0最佳实践
- Grails入门指南:InfoQ中文版
- LMS算法改进的自适应均衡器实现与仿真研究
- Oracle 8i/9i数据库基础教程:SQL*PLUS与PL/SQL详解
- 中国移动CMPP2.0短信网关协议详解
- C++指针详解:从基础到进阶
- LINGO基础教程:入门与运输问题实例
- 深入理解Linux内核第二版
- wxPython实战指南:Python图形化编程精华
- Cisco 路由器交换模块配置指南
- CORBA入门指南:从概念到C++实现
- 电子商务时代的物流配送挑战与对策
- Brio入门教程:从零开始构建报表与分析
- 宾馆管理信息系统:功能模块与数据库设计详解
