MATLAB仿真:PID控制算法在自动化系统中的参数整定与优化
版权申诉
该文档是一份关于《计算机控制技术》课程设计的详细报告,聚焦于PID控制算法的MATLAB仿真实验研究。设计者是自动化专业三年级的学生,旨在通过本次实践加深对PID算法的理解,包括其基本理论、数字控制器实现以及在实际应用中的特性。MATLAB语言在这个过程中扮演了关键角色,作为控制系统设计的工具,它帮助学生提升编程和设计能力。
设计的核心内容围绕PID控制器参数的优化展开,PID算法以其简单易用和优良的控制效果被广泛应用于工业控制中。设计者选择了带纯滞后的一阶惯性环节作为被控对象模型,其传递函数包含三个参数。设计者采用扩充临界比例度法来整定PID参数,首先设定合适的采样周期,然后逐步增大比例系数KP,直至观察到系统出现持续等幅震荡,以此确定临界比例度和振荡周期。这个过程中,MATLAB被用于绘制系统的阶跃响应曲线,显示出初始状态下可能存在的暂态性能问题,如超调大、响应不平滑。
为了改进系统性能,设计者提出通过减小采样周期来平滑响应曲线,这是对控制器参数调整的一个重要策略。此外,文档还提到了其他参数整定方法,如理论整定法、模糊自适应参数整定和遗传算法参数整定,表明在PID参数的选择上,有多种可能的途径和技术可以探索。
这份文档不仅涵盖了PID控制算法的基本理论,而且提供了实际应用中的参数整定过程和MATLAB编程示例,对于学习者来说,这是一份实用的参考资料,可以帮助他们理解PID控制在计算机控制领域的实际操作和优化技巧。
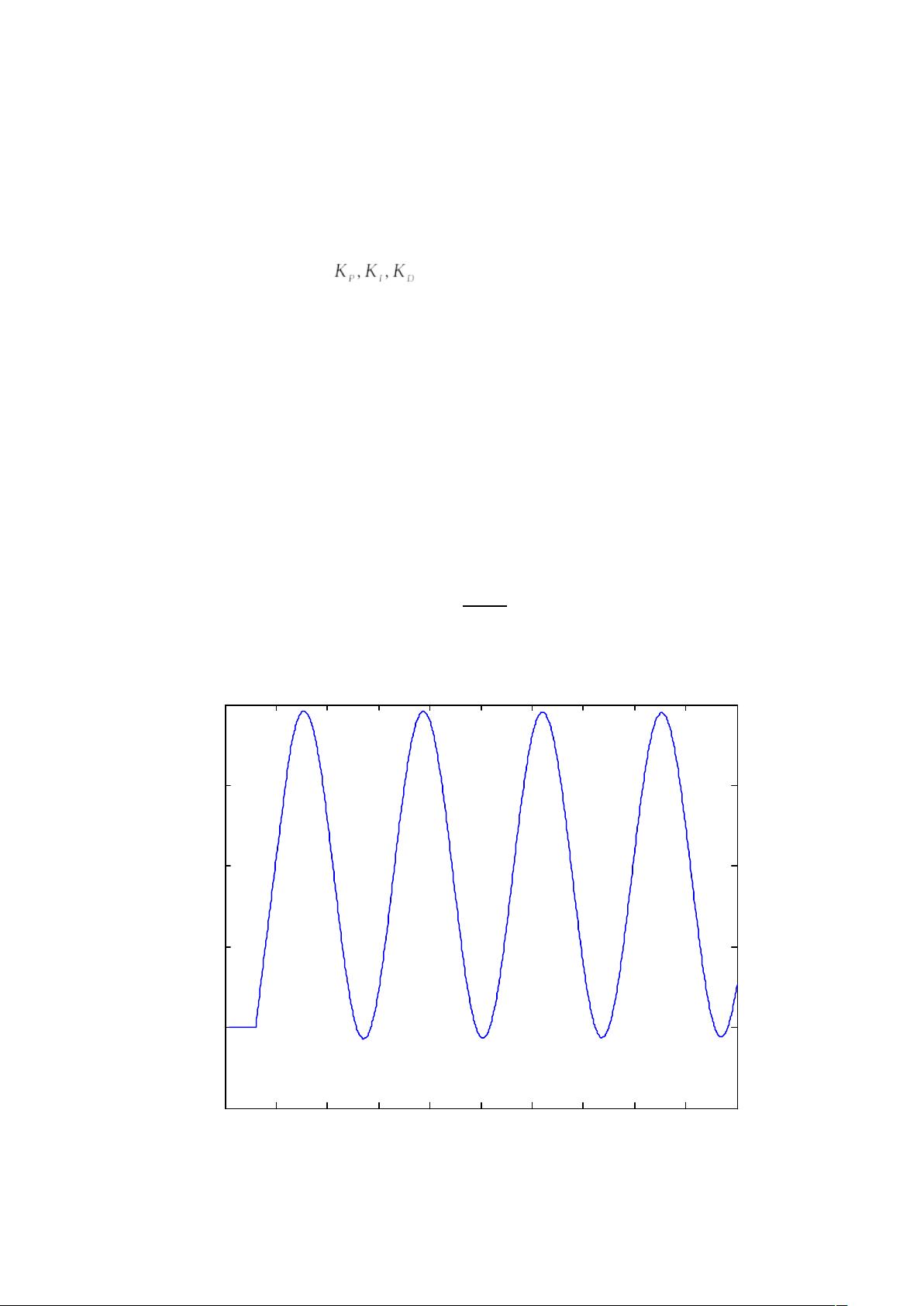
图 1
2.对 PID 控制算法的仿真研究从以下 4 个方面展开:
(1)PID 控制器调节参数 的整定
PID 参数的选定对控制系统能否得到好的控制效果是至关重要的,PID 参数的整定方
法有很多种,可采用理论整定法(如 ZN 法)或者实验确定法(比如扩充临界比例度法、
试凑法等),也可采用如模糊自适应参数整定、遗传算法参数整定等新型的 PID 参数整定
方法。在此处选用扩充临界比例度法对 PID 进行整定,其过程如下:
a) 选择一个足够短的采样周期
Ts
,由于被控对象中含有纯滞后,且其滞后时间常数
为
τ
d
= 60
,故可选择采样周期
T
s
=1
。
b) 令积分时间常数
T
I
= ∞
,微分时间常数
T
D
=0
,逐渐加大比例系数 KP(即减小比
例度
δ=1/ K
P
),直到
K
P
=K
k
= 0.567
时,控制系统发生持续等幅震荡。记下时
系 统 发 生 震 荡 的 临 界 比 例 度
δ
k
=
1
0.567
=1.764
( 即
δ
k
= 1 / K
k
) 和 振 荡 周 期
T
k
= 232.4
。持续等幅震荡如图 2 所示。
0 100 200 300 400 500 600 700 800 900 1000
-0.5
0
0.5
1
1.5
2
剩余17页未读,继续阅读
1246 浏览量
1368 浏览量
307 浏览量
2022-05-29 上传
281 浏览量
2023-03-01 上传
2023-02-20 上传
2022-10-30 上传
200 浏览量

老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 行业文档-设计装置-一种具有储热功能的太阳能采暖箱.zip
- STM32 I2C 12864 ssd1306 0.96寸 OLED 屏幕 HAL 库功能封装和样例
- redi_search:围绕RediSearch的Ruby包装器,可以与Rails集成
- 在线销售的东西
- 安卓基础开发库,包含各常用模块,让开发简单点
- 第三章 geowebcatch
- USB重启助手V1.0
- 行业文档-设计装置-一种平台护栏门.zip
- asp.net快速开发框架(eFrameWork) v2.1.0
- sys cortex-m-对Cortex-M处理器的低级别访问-Rust开发
- maxway
- FrontEnd:回购前端
- html5手机淘宝万能时装屋小游戏源码下载
- Gauntlet_FPGA:Atari的Gauntlet街机游戏的FPGA实现
- WIN11新版画图问题解决
- com.atomist:我的新项目
