利用区分特征的粒子滤波目标跟踪算法
56 浏览量
更新于2024-08-26
收藏 1.05MB PDF 举报
"基于具有区别特征的粒子滤波的目标跟踪"
在计算机视觉领域,目标跟踪是一个核心问题,尤其是在监控、自动驾驶、无人机导航等应用中。本文"基于具有区别特征的粒子滤波的目标跟踪"(Objecttracking based on particle filter with discriminative features)是一篇深入探讨这一主题的研究论文,发表于《JControl Theory Appl》2013年11月第1期,作者是赵云基和裴海龙,隶属于中国华南理工大学自主系统与网络化控制国家重点实验室。
粒子滤波(Particle Filter)是一种非线性、非高斯状态估计的贝叶斯方法,常用于解决目标跟踪问题。然而,传统的基于颜色的粒子滤波算法存在一个问题:粒子权重可能无法准确反映其重要性,这可能导致跟踪算法收敛到目标的局部区域,而非全局最优解。针对这个问题,该论文提出了一种结合在线特征选择机制的粒子滤波视觉跟踪方法。
论文的核心创新在于引入了Bhattacharyya距离和局部区分度来定义粒子的权重。Bhattacharyya距离是衡量两个概率分布相似性的指标,而局部区分度则评估目标与背景之间的差异。通过这两个指标,可以更精确地计算粒子的重要性,从而避免粒子滤波器陷入局部最优,提高跟踪的准确性。
实验结果证明,该方法不仅在单一对象跟踪过程中表现出色,而且在处理多个相似对象的跟踪场景时也具有良好的性能。关键词包括直方图梯度导向(Histogram of Oriented Gradients, HOG)、局部区分度、粒子滤波以及多目标跟踪,表明这种方法结合了图像特征提取、目标区分和高效跟踪策略。
这篇论文为解决粒子滤波在目标跟踪中的局限性提供了一个新的视角,通过利用区分性特征增强了跟踪的鲁棒性和精度。这种方法对于实时监控系统和复杂环境中的目标识别具有重要的理论和实际意义。
44 Y. Zhao et al. / J Control Theory Appl 2013 11 (1) 42–53
ized weights. The programming details for one iteration step
are shown as follows:
1) Choose a tracking object at the first frame in a vision
sequence and obtain the CH q
u
= C
I
i=1
k(
y − x
i
a
) ×
δ[h(x
i
) − u], where I is the number of pixels in the re-
gion, δ is the Kronecker delta function, the parameter a =
√
w
2
+ h
2
is used to adapt the size of the region, and the
normalized factor is
C =
1
I
i=1
k(
y − x
i
a
)
, (3)
k(r)=
1 − r
2
, if r<1,
0, otherwise.
(4)
r is the distance between the location of the pixels and the
center of the region.
2) Copy the parameters of the selected object to the par-
ticles so that the sample set S
t−1
is with N particles.
3) According to the second-order autoregressive dynam-
ics model equation (1), propagate each sample from the set
S
t−1
and obtain s
n
t
= As
n
t−1
+ ω
t−1
.
4) Calculate the color histograms in the regions defined
by each sample set S
t
: p
u
s
n
t
= C
I
i=1
k(
s
n
t
− x
i
a
)δ[h(x
i
)−
u]. Calculate the Bhattacharyya distance for each sample of
the set S
t
: ρ =1−
m
u=1
p
u
s
n
t
q
u
, where m is the number
of the bins which discretize the CH. Weight each sample of
the set S
t
according to equation (2) and obtain the weight
w
t
(n).
5) Estimate the mean state of the set S
t
and obtain the
location of the object. E(S
t
)=
N
n=1
w
t
(n)s
n
t
.
6) Rank the sample set S
t
according to the weights of
each sample. Copy particles s
n
t
with numbers of N/w
t
(n)
to sample set S
t+1
, n from 1 to N, until the sample set S
t+1
is full filled. If the sample set is not full filled, s
1
t
is copied
to the sample set S
t+1
until it is full filled.
As the above steps 2)–3) are used to initialize the color-
based particle filter, while steps 3)–6) are iteration steps of
the color-based particle filter. Fig. 3 shows the tracking ef-
fect of the color-based particle filter. The tracking object is
selected in frame one.
Fig. 3 Tracking effect of the color-based particle filter. The frames
1, 20, 30, and 40 are shown (left-right, top-down).
2.2 Object tracking algorithm with CHOG
HOG [11] can describe the shape information of objects.
HOG is calculated in gray-scale space as reference [12] de-
scribed. As scale invariant feature transform (SIFT) [28], we
adopt the method to obtain the HOG, whilst we introduce
the weight function. To increase the reliability of the HOG
when boundary pixels belong to the background, smaller
weights are assigned to the pixels further away from the re-
gion center. The weighting function is shown as
w =exp(−
i × i + j × j
2
× δ
2
), (5)
where i and j are the coordinates of the pixels depending on
the origin which is the center of the computational domain.
δ is the same as the one which is used to smooth the image
to avoid the affection of noise. According to the weight of
the HOG, the region will be obtained as follows:
B
u
y
=
I
i=1
w(x
i
)δ(b(x
i
) − u), (6)
where B
u
y
represents the magnitude of u directions in re-
gion y. I is the number pixels in the region of y, δ is the
Kronecker delta function, and b(x
i
) is the function of the
HOG computed at the pixel x
i
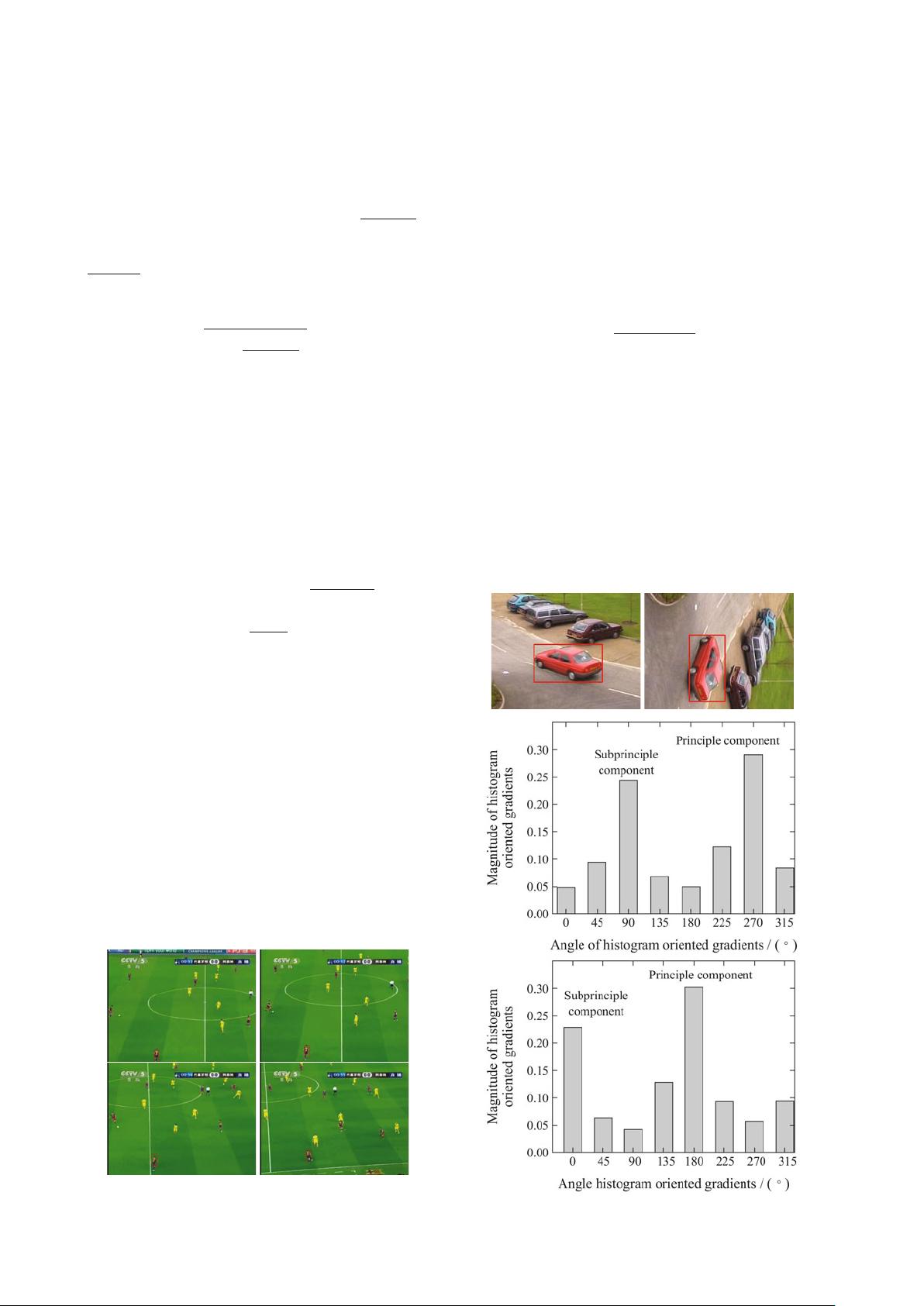
. Fig. 4 shows the HOG of
the object in different visual angle.
Fig. 4 HOG of the object in different visual angle.
剩余11页未读,继续阅读
252 浏览量
538 浏览量
2021-04-06 上传
110 浏览量
2021-09-29 上传
228 浏览量
165 浏览量

weixin_38618819
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 《Div+CSS布局大全》网页设计教程
- C#编码规范指南:最佳实践与命名约定
- UML精粹第三版:快速掌握UML 2.0核心内容
- SQL精华语句:创建、修改、查询数据库与表
- Java设计模式解析与实战
- 数字水印技术:多媒体信息的安全守护者
- 中国电信MGCP协议测试规范详解
- Hibernate入门与实战指南
- 华为软交换SIP协议详解及应用
- Word2003长篇文档排版技巧解析
- SQL Server 2005 分区表与索引优化
- 专家视角:PHP模式、框架、测试及更多
- HTML, XHTML & CSS 初学者指南
- ARM嵌入式系统开发入门指南
- 数据挖掘:实用机器学习工具与技术
- EJB3.0实战教程:从入门到精通
