"基于ARM架构的操纵器子系统研究:飞机航拍摄像机操纵器子系统控制与管理"
版权申诉
19 浏览量
更新于2024-04-06
收藏 8.25MB PDF 举报
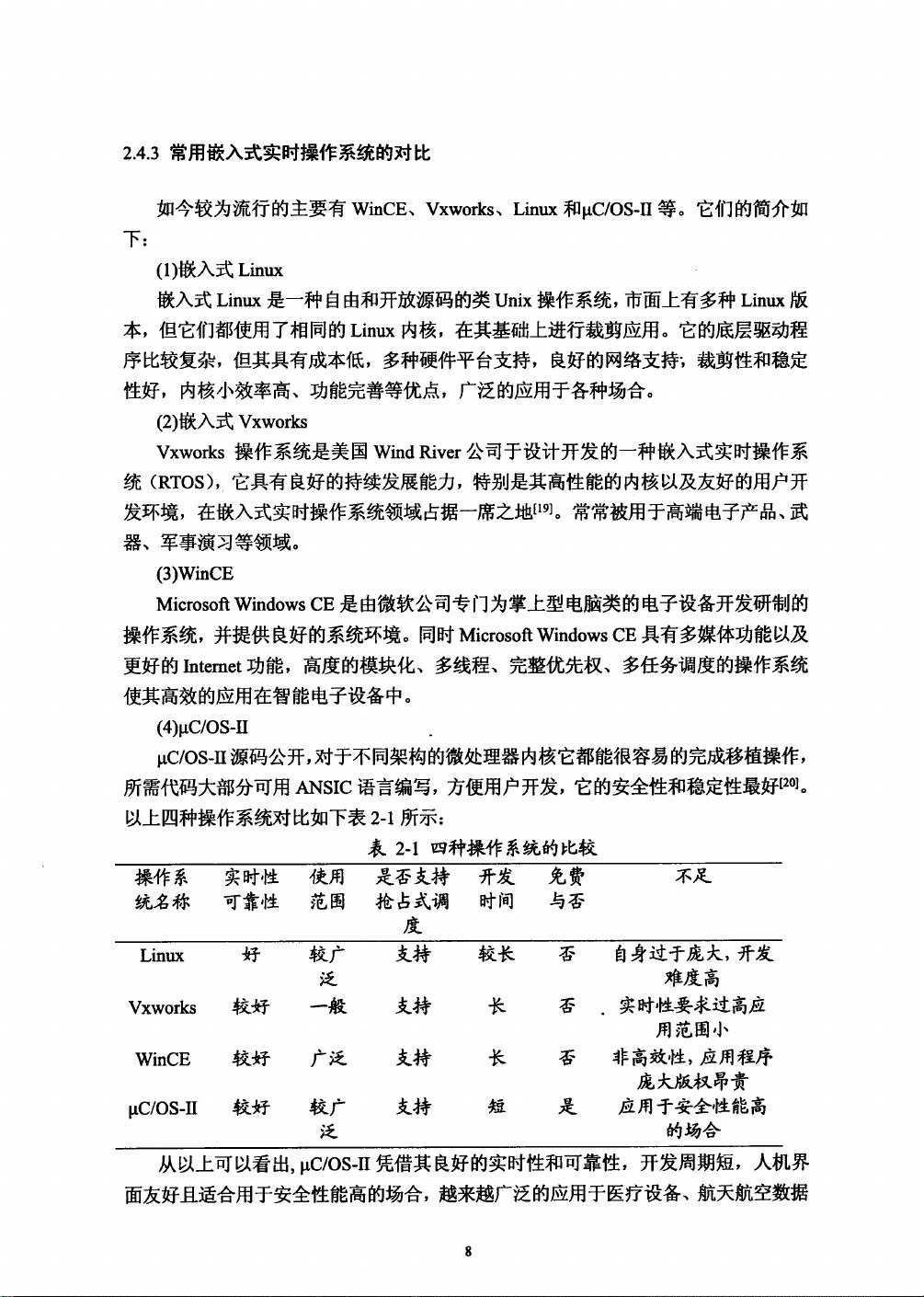
The research study focuses on the aerial camera manipulator subsystem in airplanes, which is a crucial component of aerial camera systems. The operator on the plane can send commands to the manipulator to control and manage the main aerial camera system. Additionally, the operator can receive real-time feedback and display information on an LCD screen to communicate with the aerial camera effectively.
The thesis explores the development of a manipulator subsystem based on the ARM architecture, which is a popular and efficient platform for embedded systems. The ARM architecture provides a flexible and scalable framework for designing the manipulator subsystem, allowing for easy integration with the aerial camera system and seamless communication with the operator on the plane.
The main goal of the research is to improve the functionality and performance of the manipulator subsystem, enhancing the overall efficiency and effectiveness of aerial camera operations. By utilizing the ARM architecture, the subsystem can be optimized for speed, reliability, and real-time processing capabilities, ensuring smooth and precise control of the aerial camera.
Through the implementation of advanced control algorithms and feedback mechanisms, the manipulator subsystem can perform complex maneuvers and tasks with precision and accuracy. The integration of a user-friendly interface on the LCD screen allows the operator to interact with the aerial camera system seamlessly, providing essential information and controls at their fingertips.
Overall, the research study highlights the importance of the manipulator subsystem in aerial camera operations and demonstrates the benefits of utilizing the ARM architecture for its development. By enhancing the functionality and performance of the subsystem, the overall efficiency and effectiveness of aerial camera operations can be significantly improved, leading to better results and higher quality aerial photography.
剩余54页未读,继续阅读
2022-06-18 上传
2022-06-23 上传
133 浏览量
2021-05-20 上传
2023-12-29 上传

programmh
- 粉丝: 4
- 资源: 2162
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
