ROS入门指南:系统安装与核心概念详解
需积分: 13 76 浏览量
更新于2024-07-15
1
收藏 14.4MB PDF 举报
"《ROS学习笔记.pdf》是一份详尽的ROS(Robot Operating System,机器人操作系统)入门指南,适合对机器人技术感兴趣且希望系统学习的初学者。该笔记由博主基于古月居的《ROS入门21讲》课程整理,覆盖了从Linux环境配置到ROS核心概念,再到命令行工具使用的全过程。
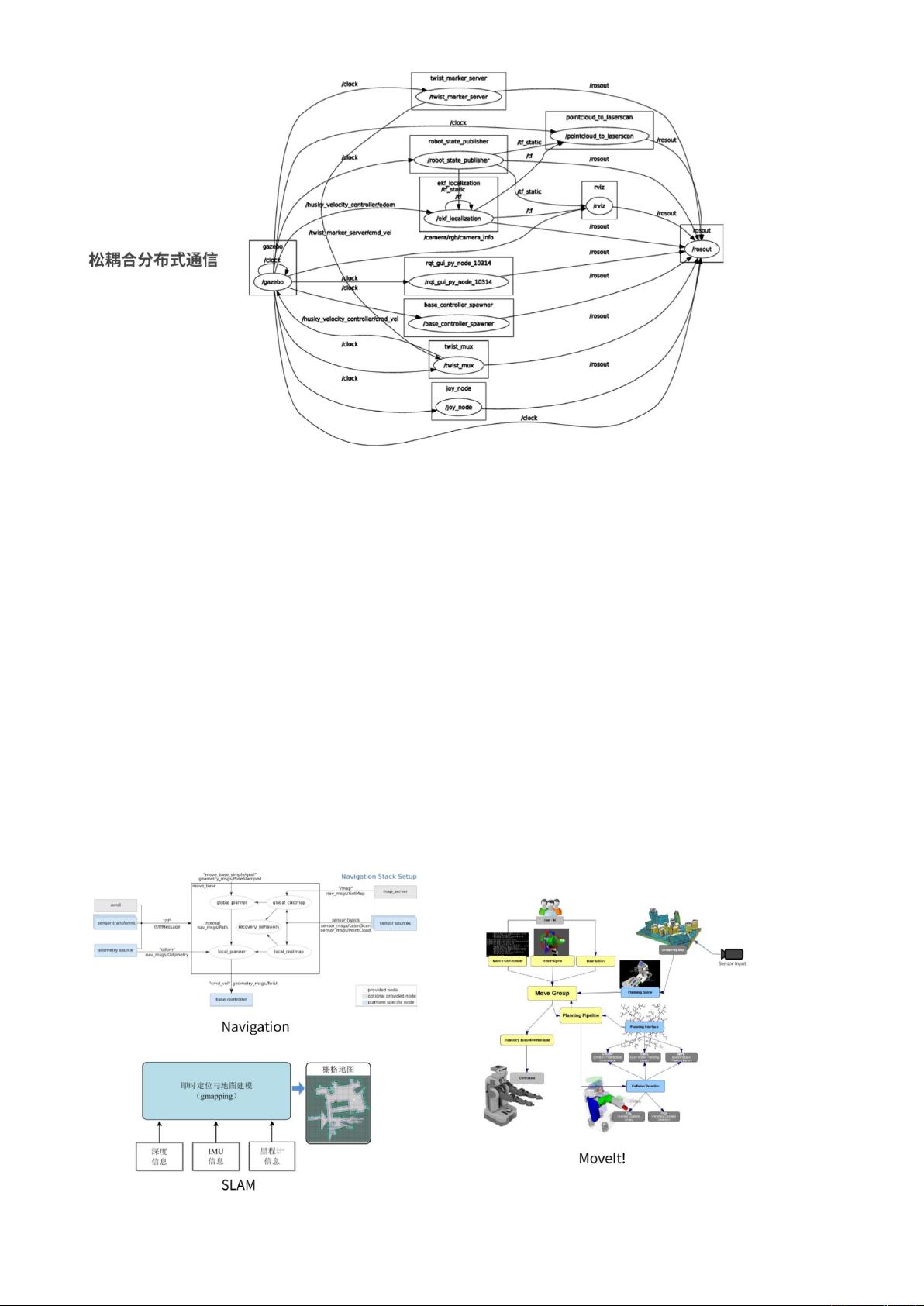
首先,章节1介绍了ROS的简介,包括其发展史和个人 Robotics(PR)项目,以及ROS在当前的应用现状。ROS被设计为一个松耦合的分布式通信框架,通过抽象为计算图的方式实现模块间的高效通信。开发工具如topic和service通信,以及丰富的生态系统的介绍,展示了ROS的强大功能。
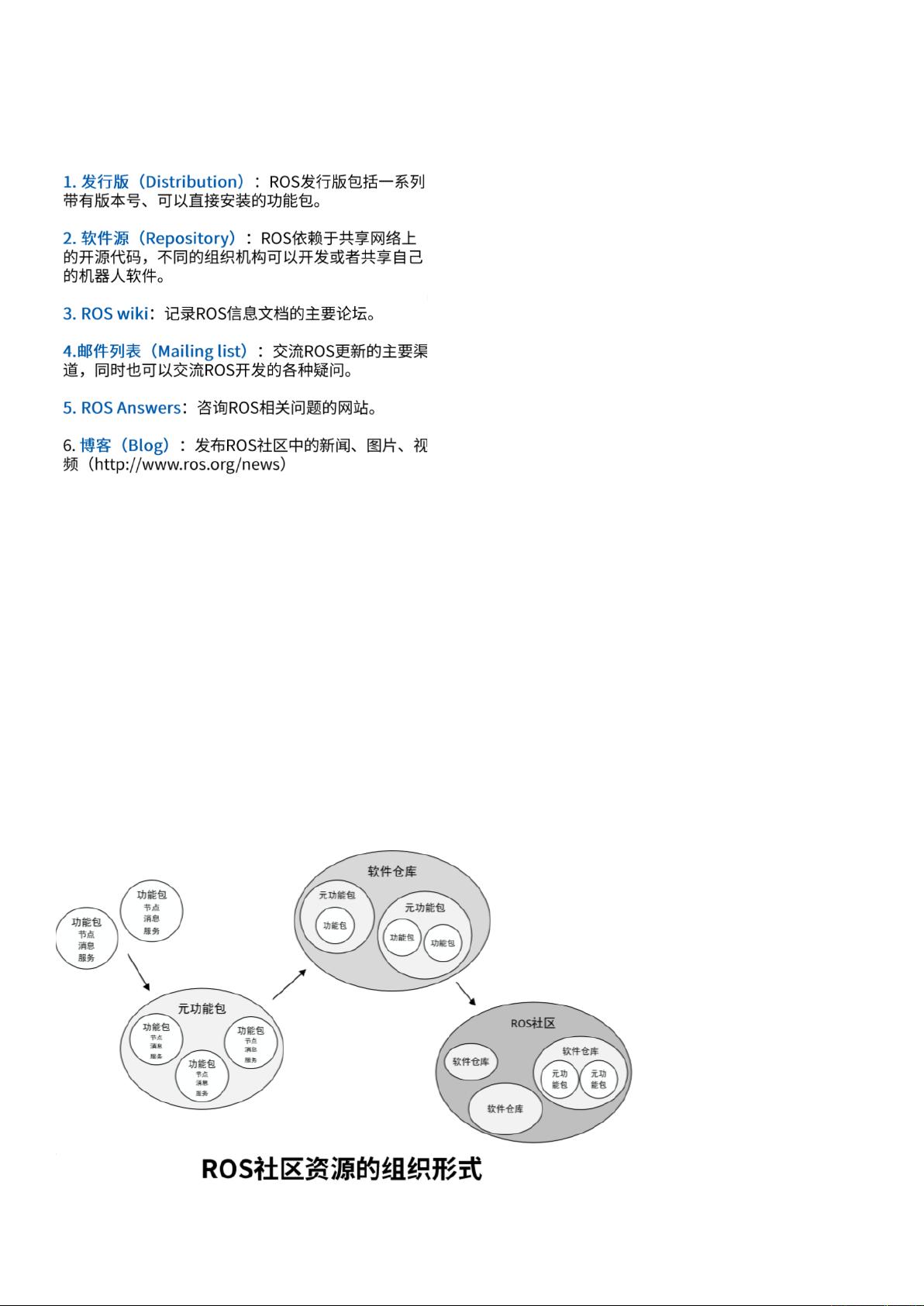
接着,章节深入探讨了ROS的核心概念,如节点和节点管理器,它们是ROS通信的基本单元。同时,笔记详细解释了两种主要的通信方式:话题(Topic)用于实时数据流,而服务(Service)则支持请求/响应模式。参数管理和文件系统层级也是重要内容,如功能包(Package)、元功能包(MetaPackage)及其清单(Packagemanifest)的结构。
在实际操作部分,笔记指导读者如何在Ubuntu环境下安装和配置ROS系统,包括添加软件源、密钥、安装步骤以及设置环境变量。此外,还介绍了常用的ROS命令行工具,如`roscore`、`rosrun`,以及图形化工具如`rqt_graph`,帮助用户理解和管理 ROS 系统的不同组件,如topic、service、message类型等。
最后,笔记指导读者如何创建工作空间和功能包,强调了`CMakeList.txt`和`package.xml`的重要性,这些都是构建和组织ROS项目的基石。
《ROS学习笔记.pdf》是一本全面且实用的ROS入门教程,无论是初次接触还是有一定基础的学习者,都能从中获取到丰富的知识和实践经验,帮助快速上手ROS世界。博主的辛勤整理使得这份笔记成为新手小白快速入门ROS的理想资源。"
10
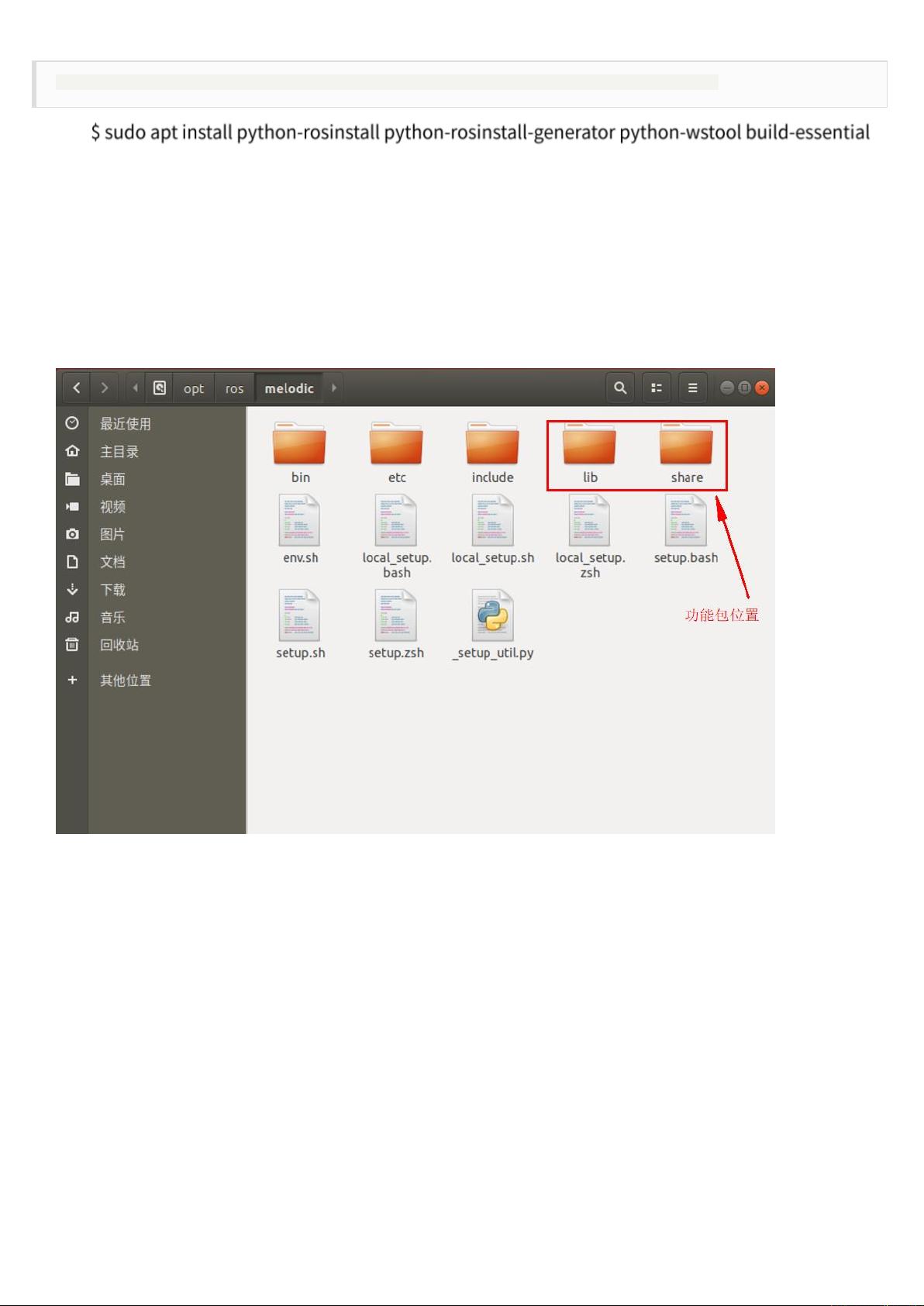
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
-------------------------------------------ROS 安装结束-------------------------------------------
基本的通信,可视化命令行工具核心组件安装完成。
默认位置:/opt/ros
melodic 版本
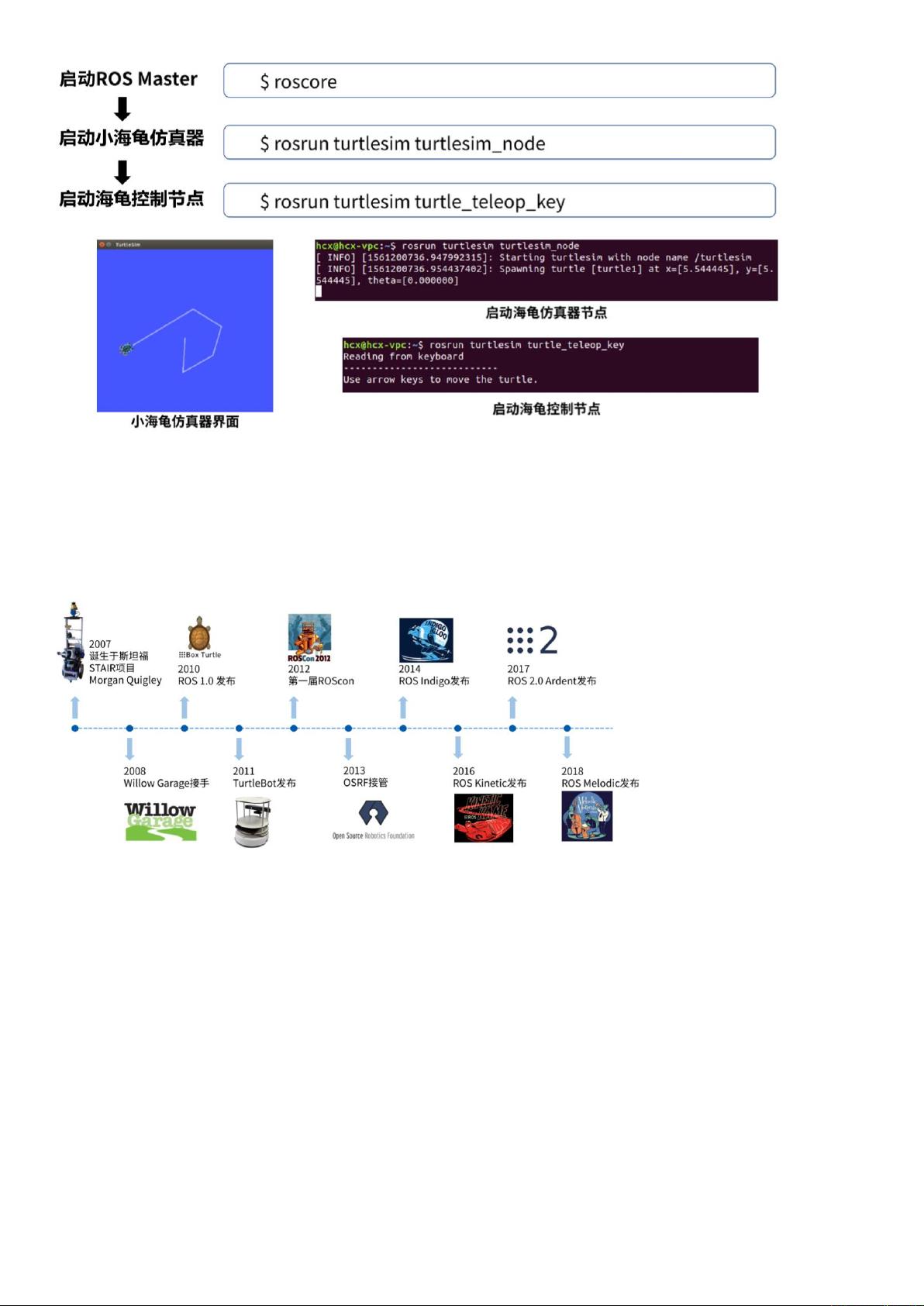
三、 验证 ROS 是否已经安装成功
roscore 指令:用于运行 ros master (运行管理器)
运行一个 ROS 学习过程中基础例程----小海龟仿真器,具体步骤:
1) 运行一个 ros master 运行管理器
2) 打开新终端,运行一个小海龟的可视化仿真器
3) 打开新终端,运行海龟控制节点
剩余100页未读,继续阅读
点击了解资源详情
164 浏览量
181 浏览量
504 浏览量
802 浏览量
258 浏览量
465 浏览量
150 浏览量
323 浏览量









