芯与物UM626N-00模组用户手册:双频高精度RTK定位
需积分: 0 43 浏览量
更新于2024-06-25
收藏 3.08MB PDF 举报
"2010344687UM626N-00_User Manual_CH_P1.0.0.pdf"
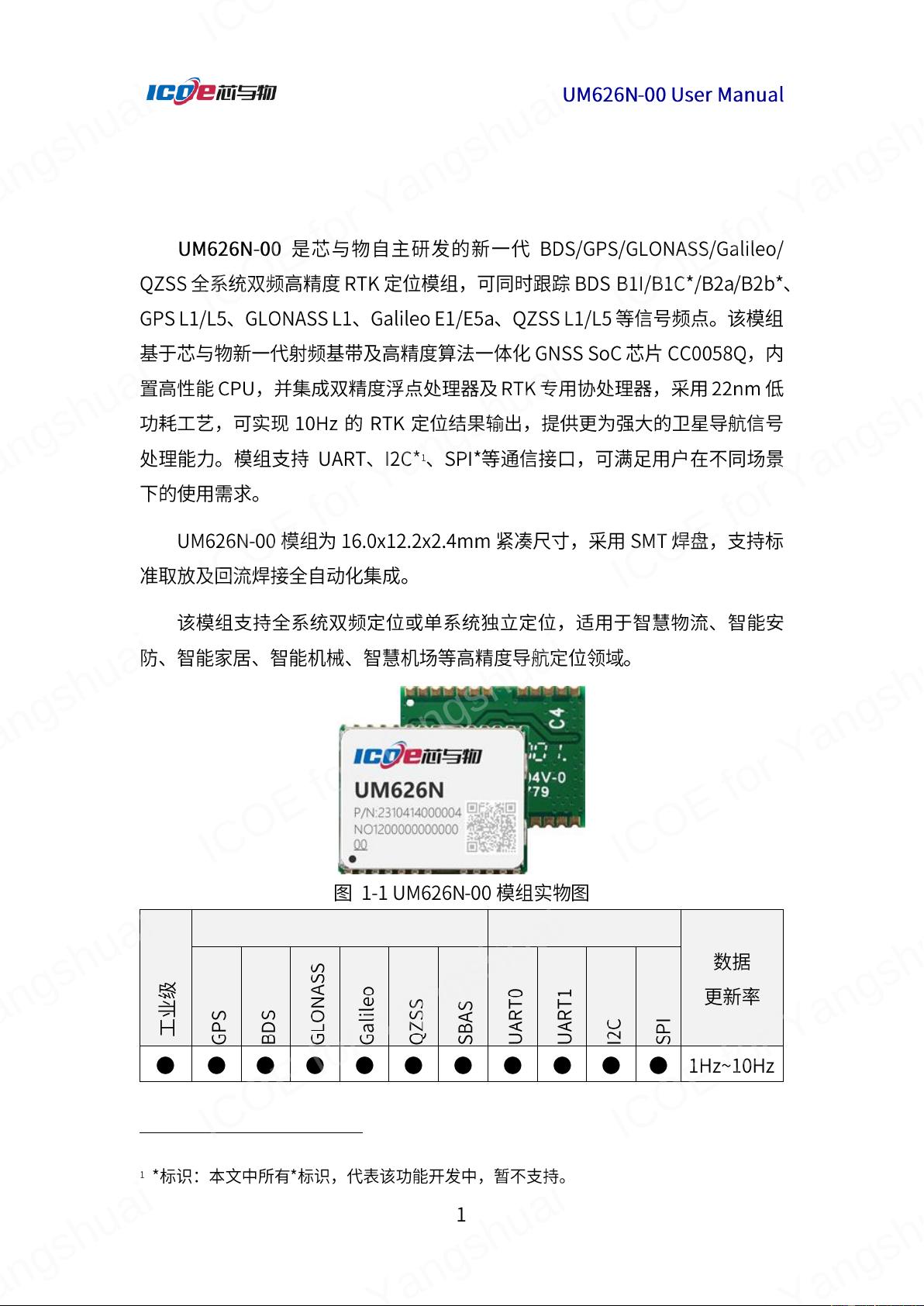
这份文档是芯与物(上海)技术有限公司发布的UM626N-00双频高精度RTK定位模组的用户手册,主要针对技术人员,详细介绍了该模块的硬件特性、性能指标以及使用方法。RTK(Real-Time Kinematic)是一种实时差分GPS技术,常用于高精度定位应用,如测绘、自动驾驶和无人机导航等领域。
手册中提到的"ICOEforYangshuai"可能是指芯与物公司的一种特定技术或解决方案,但具体含义在提供的内容中没有明确解释,可能是某种专有技术或产品系列的标识。"ICO"可能是缩写,但在这里的上下文中无法确定其确切含义。
手册的修订记录显示,P1.0.0版本的UM626N-00模组用户手册于2022年6月15日发布,这是该文档的初始版本。公司对手册中的信息持有知识产权,并强调了法律免责声明,指出文档内容不构成任何专利、商标、版权的转让,且公司不对产品使用或性能提供额外的保证。如果未按手册操作,造成的任何问题,公司不承担责任。此外,产品规格可能会更新,建议用户在购买前与公司或经销商确认最新规格。
UM626N-00模组可能是用于接收和处理双频GPS信号的设备,能够提供亚米级甚至厘米级的定位精度。手册可能会详细阐述模组的物理尺寸、接口、电源需求、射频性能、数据输出格式、初始化和配置过程,以及如何集成到更复杂系统中的指导。
"芯与物"、"芯&物"和"ICOE"是芯与物(上海)技术有限公司的注册商标,其他名称和品牌则属于各自所有者。手册的版权归属芯与物(上海)技术有限公司,所有权利保留。
手册的前言强调,其目的是为了帮助技术人员理解并正确使用UM626N-00模组,内容可能包括安装步骤、软件设置、故障排查以及兼容性信息等。由于手册不是面向一般读者,所以可能包含专业术语和技术细节,适合具备一定电子和GPS技术背景的用户阅读。
这份用户手册是芯与物公司对其双频高精度RTK定位模组的全面介绍,是技术人员进行产品评估、集成和维护的重要参考资料。
1. 产品简介
系统
接口
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
ICOE for Yangshuai
剩余26页未读,继续阅读
2022-09-19 上传
2020-11-23 上传
2021-08-06 上传
2022-09-21 上传
2021-08-06 上传
2021-08-06 上传


cloudzwt777
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
