Apollo ROS系统优化与去中心化原理
需积分: 5 159 浏览量
更新于2024-08-05
1
收藏 3.9MB PDF 举报
"该资源是一份关于Apollo ROS原理的进阶课程资料,主要探讨了ROS在自动驾驶中的应用,特别是Apollo项目对ROS的优化,以及ROS网络拓扑、鲁棒性和数据传输效率等方面的问题。"
在ROS(Robot Operating System)系统中,Apollo项目针对ROS的原始设计进行了改进,以提高在自动驾驶领域的性能。其中最重要的改造之一是引入共享内存技术来减少数据拷贝,从而提升通信效率。在大规模数据传输的情况下,传统的ROS机制会因为频繁的数据拷贝而影响性能。通过共享内存, Apollo能够减少这种开销,使得高数据量的通信变得更加高效。
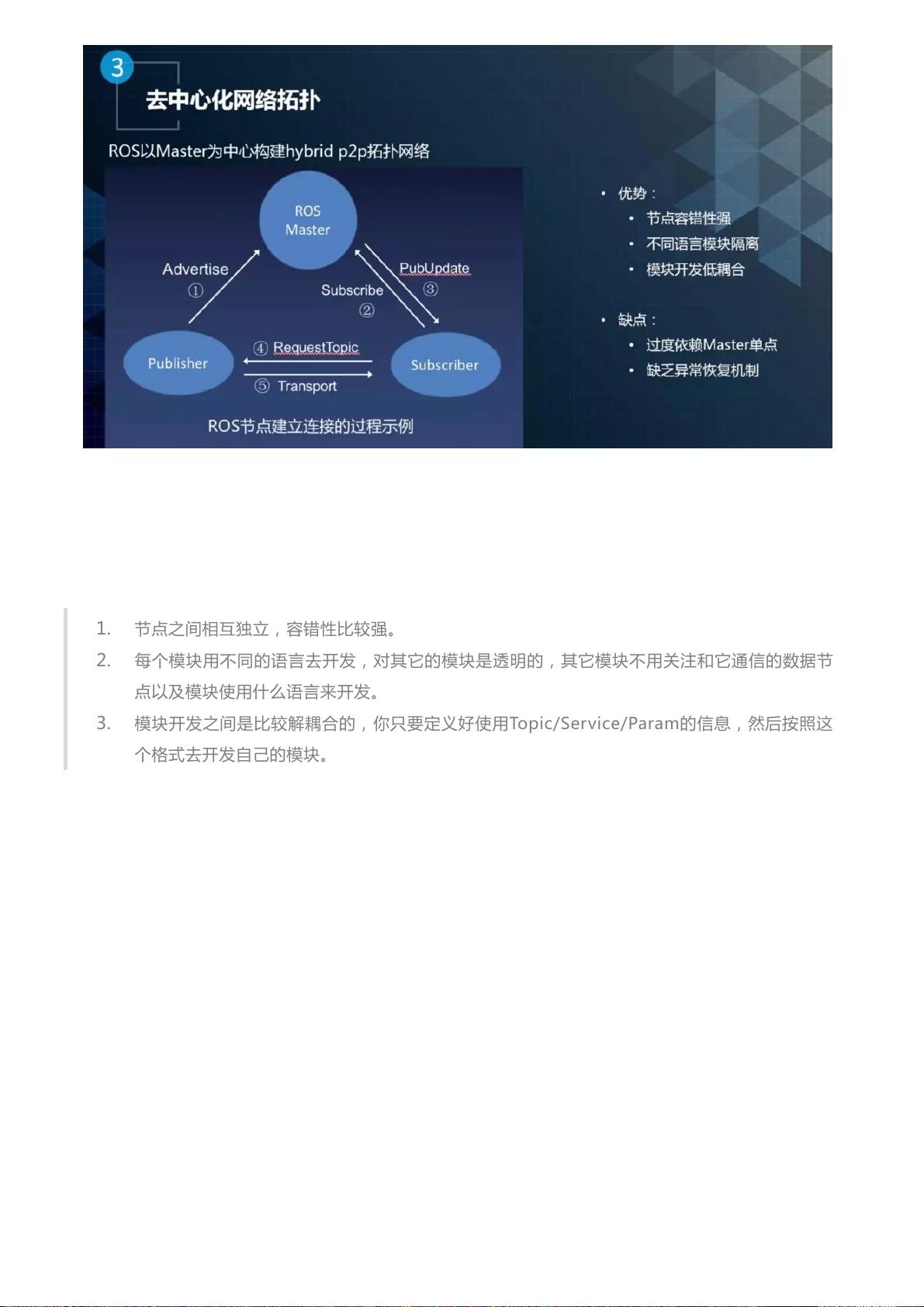
ROS的核心是一个称为Rosmaster的节点管理器,它构建了一个去中心化的P2P(点对点)网络拓扑。这种拓扑结构具有以下优点:
1. 节点间相互独立,增强了系统的容错性,即使某个节点失效,其他节点仍能继续运行。
2. 模块可以使用不同的编程语言开发,彼此之间的通信透明,不影响整体系统。
3. 开发过程高度解耦,只需定义好Topic、Service和Param的信息,按标准开发即可。
然而,ROS的去中心化拓扑也存在明显缺点:
1. 节点间的通信高度依赖于Rosmaster,建立通信链路的五步过程中,有三步涉及Rosmaster,这可能导致单点故障问题。
2. 当Rosmaster或任何节点挂掉时,ROS没有内置的异常恢复机制,其他节点可能无法感知并适应这种变化,可能导致错误行为。
在多机方案中,如Nvidia Drive PX2这样的自动驾驶平台,单点故障问题尤为突出。PX2由主系统和冗余备份系统组成,如果使用ROS进行通信,Master节点的故障会导致整个系统的稳定性下降。因此,为了解决这个问题,开发者需要考虑如何在ROS架构中引入容错机制,确保在网络拓扑中即使有节点失效,系统仍能正常运行。
在Apollo项目中,这些挑战通过优化通信协议、提高鲁棒性和增加故障检测机制得以缓解。Apollo的优化不仅提高了ROS在自动驾驶场景下的实时性和效率,也增强了系统的稳定性和安全性。学习者可以通过这份资料深入理解Apollo如何利用ROS来解决自动驾驶中的通信和可靠性问题,进一步提升自动驾驶系统的性能。
ROS是以Rosmaster节点管理器建立起来的一个P2P拓扑网络,这种拓扑网络有很明显的优势,如
下:
1. 节点之间相互独立,容错性比较强。
2. 每个模块用不同的语言去开发,对其它的模块是透明的,其它模块不用关注和它通信的数据节
点以及模块使用什么语言来开发。
3. 模块开发之间是比较解耦合的,你只要定义好使用Topic/Service/Param的信息,然后按照这
个格式去开发自己的模块。
但是也有两个比较明显的缺点。第一,节点之间的通信过于依赖Rosmaster单点。两个节点进行通信
的链路过程,大概分为五部。第一步:发送节点去向Master注册一个发送节点。第二步:接收节点
去向Master注册一个接收节点。第三步:Master向接收节点发送一个已有发送节点的一个信息拓
扑。第四步:接收节点拿到这个拓扑信息之后去向发送节点请求建立一个tcp连接。第五步:在发送
节点和接收节点建立一个P2P的单点拓扑连接之后就持续不断的向接收节点发送信息。整个过程中对
Master依赖包含三步,在建立实际通信之后,对Master的依赖可能会降低很多,但是在建立之前是
比较依赖Master节点的。
第二,ROS没有提供一种异常恢复机制。如果某一个节点挂掉,尤其是Master节点挂掉,其它的节
点却不知道发生了这样的行为,还会认为整个系统运行仍然处在正确的状态中。比如发送节点里面有
一些Service或者Param相关的请求,它还是会照常去发请求或者是设置这个参数信息,这样就会产
生一些不可控的行为。
剩余10页未读,继续阅读
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-04-17 上传
2022-05-04 上传
2022-04-17 上传
2022-04-17 上传

疯狂的机器人
- 粉丝: 9037
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
