ROS入门指南:让机器人编程变得简单
需积分: 10 62 浏览量
更新于2024-07-18
收藏 14.17MB PDF 举报
"这是一本面向初学者的关于Robot Operating System (ROS) 的书籍,名为《Robot Operating System for Absolute Beginners》。本书旨在简化机器人编程,由Lentin Joseph撰写,涵盖了Ubuntu操作系统、Python和C++编程语言以及ROS的基本概念和技术。"
ROS,全称Robot Operating System,是一个开源操作系统,专门用于开发和管理机器人应用。对于初学者来说,理解ROS的核心概念是至关重要的。ROS提供了一个框架,使得机器人软件开发可以模块化,便于复用和协作。它包括了消息传递机制、包管理系统、设备驱动、服务接口和节点管理等组件。
在书中,读者将学习如何设置Ubuntu开发环境,因为ROS通常在Ubuntu上运行。Ubuntu是一个基于Debian的Linux发行版,提供了稳定的软件更新和强大的开发者工具。安装ROS需要按照特定的步骤进行,包括安装依赖、配置源列表和执行安装脚本。
Python和C++是ROS中常用的编程语言。Python以其易读性和快速开发能力而受到欢迎,常用于编写控制逻辑和测试脚本。C++则提供了更底层的控制和更高的性能,适合于实现复杂的算法和高效的数据处理。书中会教授如何使用这两种语言与ROS接口进行交互,创建和运行ROS节点,以及如何编写和发布消息。
ROS中的关键概念包括节点(Node)、话题(Topic)、服务(Service)和参数(Parameter)。节点是ROS程序的基本执行单元,它们通过话题交换数据,通过服务请求和响应完成特定任务。参数服务器则允许在运行时动态配置系统参数。
此外,ROS还提供了许多工具,如`roslaunch`用于启动多个节点,`rqt`和`rviz`用于图形化界面,以及`rosbag`用于记录和回放传感器数据。这些工具极大地简化了调试和测试过程。
学习ROS不仅可以帮助初学者理解机器人软件架构,还能让他们掌握实际的机器人项目开发流程。通过阅读《Robot Operating System for Absolute Beginners》,读者将能够构建自己的第一个ROS机器人应用程序,并逐步深入到更复杂的机器人系统设计中去。

5
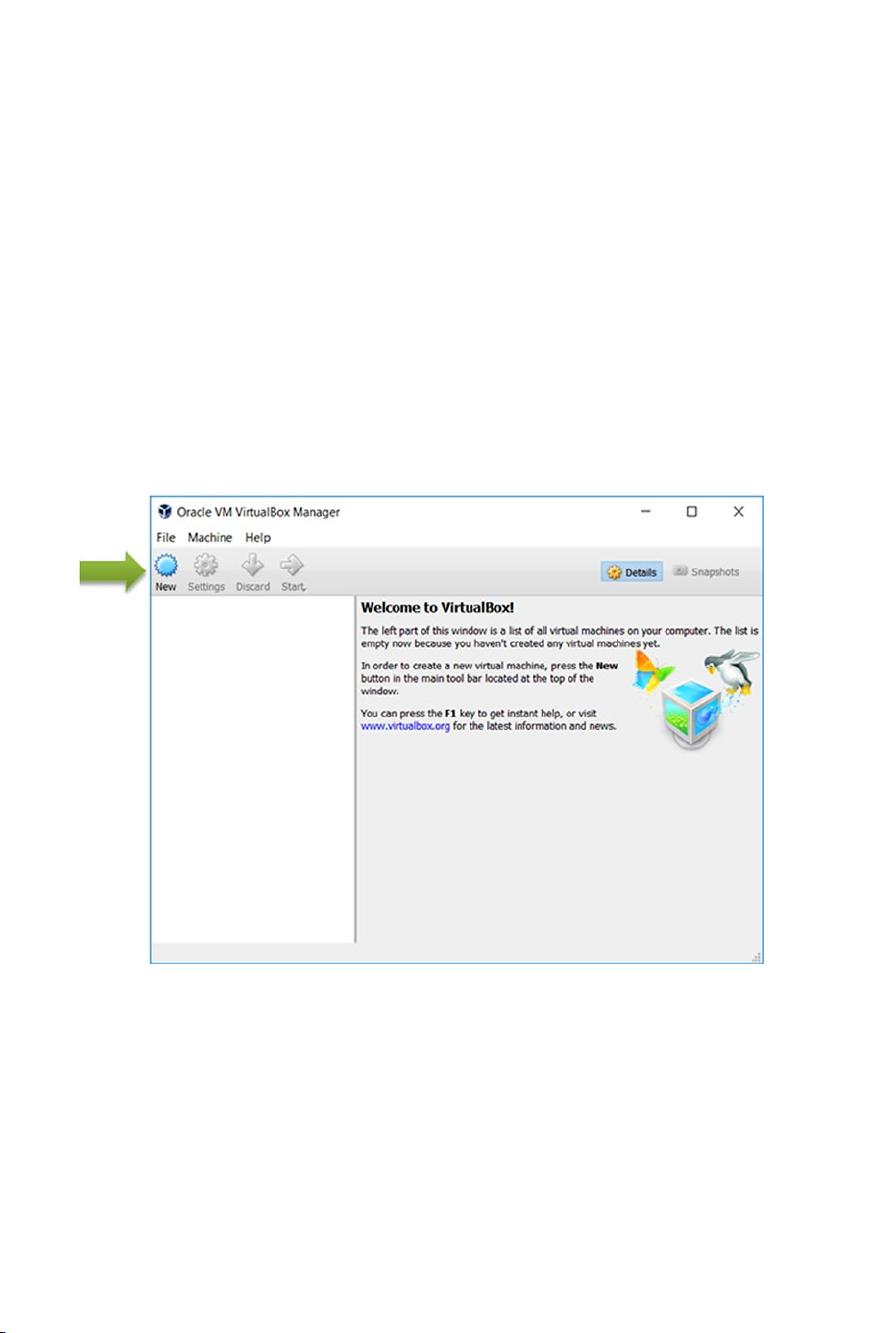
Installing VirtualBox
VirtualBox (www.virtualbox.org) is a virtualization software that allows
an unmodified operating system (with all of its installed software) to run
in a special environment on top of your existing operating system. This
environment, called a virtual machine, is created by the virtualization
software by intercepting access to certain hardware components and
certain features. The physical computer is called the host, and the virtual
machine is called the guest. The guest can run on the host computer, which
thinks that it’s running on a real machine.
You can install VirtualBox on a host PC running Windows, Linux, OS X,
or Solaris (www.virtualbox.org/wiki/Downloads). In this chapter, we
install it on a Windows PC.You can choose the Windows platform from
a list and install it on your Windows PC (see Figure1-2). The installation
of VirtualBox is easy; you may not have any confusing issues. During
installation, you are asked to install virtual drivers. You can accept the
driver installation.
Figure 1-2. Downloading the virtual box for Windows host
If you are working in OS X or Linux, choose the platform accordingly.
The installation instructions can be found at www.virtualbox.org/
manual/ch02.html.
Chapter 1 GettinG Started withUbUntU LinUx forrobotiCS

剩余292页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-06-06 上传
2018-06-02 上传
2021-10-06 上传
2019-11-05 上传
2019-07-19 上传
点击了解资源详情

weixin_40749608
- 粉丝: 0
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
