任务导向流:提升视频超分与去噪的艺术
"《基于任务导向流的视频增强:深度学习新进阶》
本文介绍了一项关于视频处理领域的创新工作,特别是在低帧率视频的提升和去噪方面。视频超分(VideoEnhancement)是通过深度学习技术增强低分辨率视频质量的重要应用,而任务导向流(Task-OrientedFlow)则是解决这一问题的关键突破。传统的光学流估计方法,如EpicFlow[28],虽然能精确预测物体运动,但其在特定任务上的性能可能并不理想,如帧插值时可能会导致诸如模糊边缘或失真物体细节等问题,如图1中的(I-c)所示。
任务导向流方法旨在针对不同任务定制更精准的流估计。相比于EpicFlow,它能够减少因估计误差产生的视觉干扰,例如在帧插值过程中,(I-d)所示的任务导向流能够消除像手指那样模糊不清的细节,如图1的(I-e)所示。这种方法的优势在于它考虑了具体任务的需求,从而提供更高质量的视频插值效果。
对于视频去噪任务,任务导向流同样展现出了优势。如图1的(II-b)和(II-d)所示,当用EpicFlow进行去噪时,尽管整体运动估计准确,但可能存在残留的噪声。然而,使用任务导向流进行去噪后,(II-e)的结果表明,图像的清晰度得到了显著提升,即使在输入是噪声视频的情况下也能获得更纯净的输出,如(II-a)所示。
总结来说,本文的核心内容是深度学习在视频处理中的一个新进展——任务导向流技术,它通过优化流估计以适应特定任务需求,有效改善了视频帧插值和去噪的质量,使得视频处理的性能迈上了新的台阶。这是一项具有广泛应用潜力的技术,对于提高视频内容的质量和用户体验具有重要意义。"
super-resolution.
Temporal Frame Interpolation
Given a low frame rate
video, a temporal frame interpolation algorithm generates
a high frame rate video by synthesizing additional frames
between two temporally neighboring frames. Specifically, let
I
1
and
I
3
be two consecutive frames in an input video, the
task is to estimate the missing middle frame
I
2
. Temporal
frame interpolation doubles the video frame rate, and can be
recursively applied for even higher frame rates.
Video Denoising/Deblocking
Given a degraded video with
artifacts from either the sensor or compression, video denois-
ing/deblocking aims to remove the noise or compression arti-
facts to recover the original video. This is typically done by
aggregating information from neighboring frames. Specifi-
cally, Let
I
1
,
I
2
, ...,
I
N
be N-consecutive frames in an input
video, the task of video denoising is to estimate the middle
frame
I
∗
ref
given degraded frames
I
1
,
I
2
, ...,
I
N
as input. For
the ease of description, in the rest of paper, we simply call
both tasks as video denoising.
Video Super-Resolution (SR)
Similar to video denoising,
given
N
consecutive low-resolution frames as input, the task
of video super-resolution is to recover the high-resolution
middle frame. In this work, we first upsample all the input
frames to the same resolution of the output using bicubic
interpolation, and our algorithm only needs to recover the
high-frequency component in the output image.
4. Task-Oriented Flow for Video Processing
Most motion-based video processing algorithms has two
steps: motion estimation and image processing. For example,
in temporal frame interpolation, most algorithms first estimate
how pixels move between input frames (frame 1 and 3), and
then move pixels to the estimated location in the output frame
(frame 2) [
2
]. Similarly, in video denoising, algorithms first
register different frames based on estimated motion fields
between them, and then remove noises by aggregating infor-
mation from registered frames.
In this paper, we propose to use task-oriented flow
(TOFlow) to integrate the two steps. To learn the task-oriented
flow, we design an end-to-end trainable network with three
parts (Figure 3): a flow estimation module that estimates the
movement of pixels between input frames; an image transfor-
mation module that warps all the frames to a reference frame;
and a task-specific image processing module that performs
video interpolation, denoising, or super-resolution on regis-
tered frames. Because the flow estimation module is jointly
trained with the rest of the network, it learns to predict a flow
field that fits to a particular task.
4.1. Toy Example
Before discussing the details of network structure, we first
start with two synthetic sequences to demonstrate why our
TOFlow can outperform traditional optical flows. The left
Case I: With Ground Truth Flows
Case II: With Task-Oriented Flows
Input frames
TOFlow
Warped by
TOFlow
Denoised
frame
Video Denoising
?
Case I: With Ground Truth Flows
Case II: With Task-Oriented Flows
Input frames
TOFlow
Warped by
TOFlow
Interpolated
2
nd
frame
Frame Interpolation
Warped by
TOFlow
Denoised
frame
GT flow Warped by
GT flow
Interpolated
2
nd
frame
GT flow
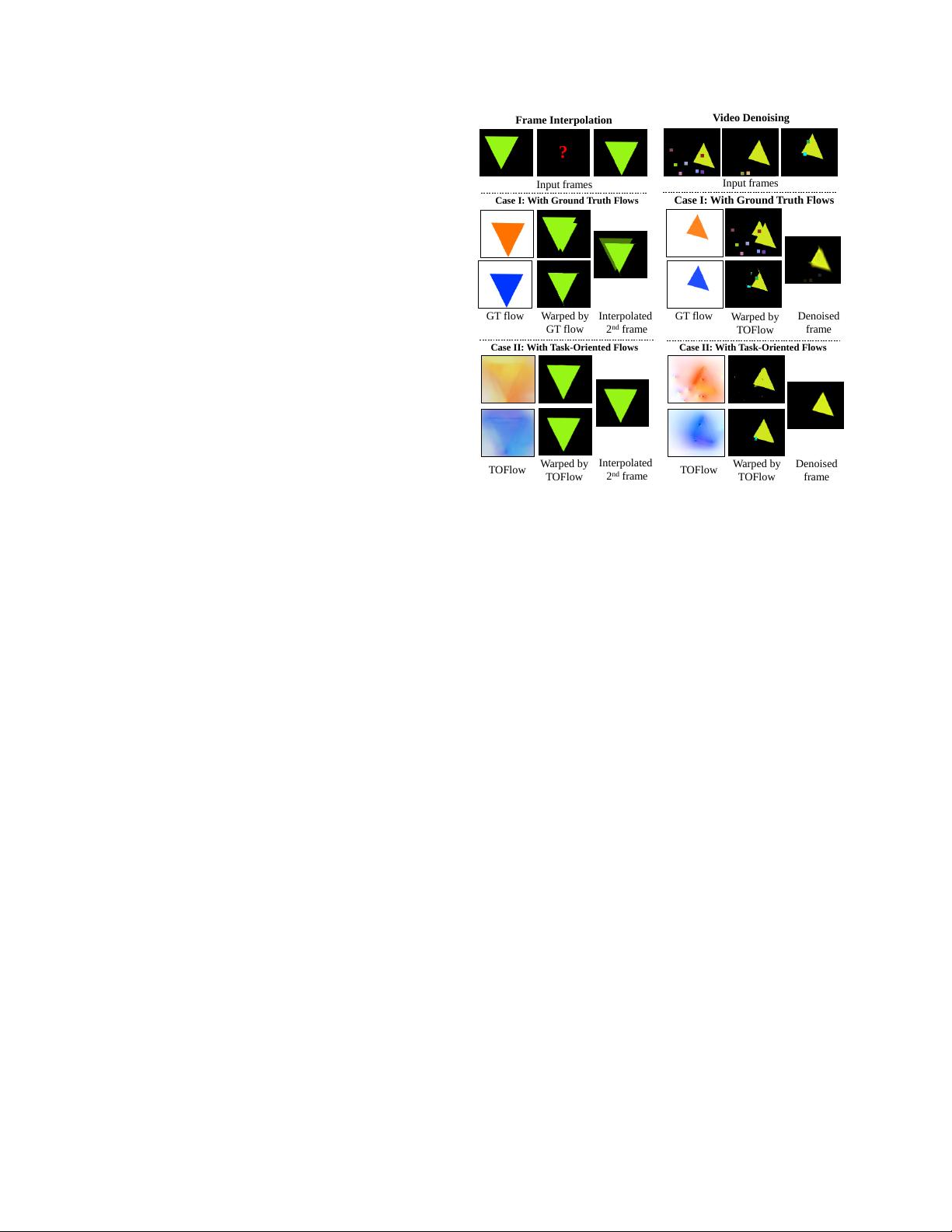
Figure 2: A toy example that demonstrates the effectiveness
of task oriented flow over the traditional optical flow. See
Section 4.1 for details.
of Figure 2 shows an example of frame interpolation, where
a green triangle is moving to the bottom in front of a black
background. If we warp both the first and third frames to the
second, even using the ground truth flow (Case I, left column),
there is an obvious doubling artifact in the warped frames due
to occlusion (Case I, middle column), which is a well-known
problem in the optical flow literature [
2
]. The final interpola-
tion result based on these two warp frames still contains this
artifact (Case I, right column). In contrast, TOFlow does not
stick to object motion: the background should be static, but
it has non-zero motion (Case II, left column). With TOFlow,
however, there is barely any artifact in the warped frames
(Case II, middle column) and the interpolated frame looks
clean (Case II, right column). The hallucinated background
motion actually helps to reduce the doubling artifacts. This
shows that TOFlow can reduce errors and synthesize frames
better than the ground truth flow.
Similarly, on the right of Figure 2, we show an example of
video denoising. The random small boxes in the input frames
are synthetic noises. If we warp the first and the third frames
to the second using the ground truth flow, the noisy patterns
(random squares) remain, and the denoised frame still contains
some noise (Case I, right column. There are some shadows of
boxes on the bottom). But if we warp these two frames using
TOFlow (Case II, left column), those noisy patterns are also
reduced or eliminated (Case II, middle column), and the final
denoised frame base on them contains almost no noise. This
also shows that TOFlow learns to reduce the noise in input
frames by inpainting them with neighboring pixels, which
剩余14页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-01-22 上传
2021-04-03 上传
140 浏览量
2021-07-22 上传
2021-06-18 上传
2013-02-14 上传

fengfeng11246
- 粉丝: 3
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
