改进自适应k均值聚类在三维点云骨架提取中的应用
版权申诉
150 浏览量
更新于2024-06-27
1
收藏 5.71MB DOCX 举报
"本文主要研究了基于改进自适应k均值聚类的三维点云骨架提取算法,旨在解决传统L1-中值骨架提取算法在处理三维点云时存在的细节丢失、可重复性差和骨架连接错误等问题。"
在当前的IT领域,三维点云技术已经成为三维模型处理的关键技术,广泛应用于三维重建、模型分割、点云配准和模型形状检索等场景。骨架模型作为三维模型的重要表示形式,能够简洁地展现模型的拓扑结构和几何特征。然而,随着点云模型复杂性的增加,对骨架提取算法的准确性和效率提出了更高要求。
传统的L1-中值骨架提取算法虽因快速和高效而被广泛应用,但它存在一些局限性:如随机采样的不可重复性、在密度不均匀时容易丢失细节,以及基于阈值的骨架伸长可能导致错误连接。为了解决这些问题,本文提出了一个新的方法,即基于改进自适应k均值聚类的L1-中值骨架提取算法。
该算法首先利用八叉树结构对散乱的三维点云进行组织,考虑到每个体素内点的密度差异。随后,进行中值采样,并根据采样点集自适应地确定k均值聚类的初始中心,从而实现区域划分。通过局部中值迭代收缩,得到各个区域内的骨架分支。最后,通过L1局部分支拟合曲线进行骨架平滑和连接,减少迭代次数,同时考虑密度因素和异常点的影响,避免细节丢失。
与原始的L1-中值算法相比,该改进算法显著提高了骨架的准确性和可重复性,有效解决了跨区域连接错误,从而实现了更好的骨架提取效果。这一研究进展对于提升三维点云处理的精度和稳定性具有重要意义,为后续的点云分析和应用提供了更为可靠的骨架模型基础。
国内外的研究现状表明,骨架提取技术自Blum在1967年提出的中轴变换以来,已经历了多种方法的发展,包括Dey的三维曲线骨架定义和Cornea等人的骨架属性概述。尽管目前尚无统一的标准定义,但各种骨架提取技术都在不断探索和完善,以适应日益复杂的三维模型处理需求。本文的贡献在于结合聚类方法改进了现有的骨架提取算法,为点云处理领域带来新的优化方案。
2. 基于八叉树分割的点云化简
2.1 八叉树分割
将输入点云体素化, 利用八叉树算法覆盖输入点云. 选择基于指针区域的八叉树进行
实验, 可以达到以下 3 个目的: 1)把散乱点云数据有序组织好, 起到索引的作用; 2)实现有计
划地数据简化; 3)为特征点估计定义邻域点.
八叉树分割方法递归地将空间上的所有节点都分解成 8 个一样的子节点, 即在这个空
间上的所有体素的几何信息是一致的
[28]
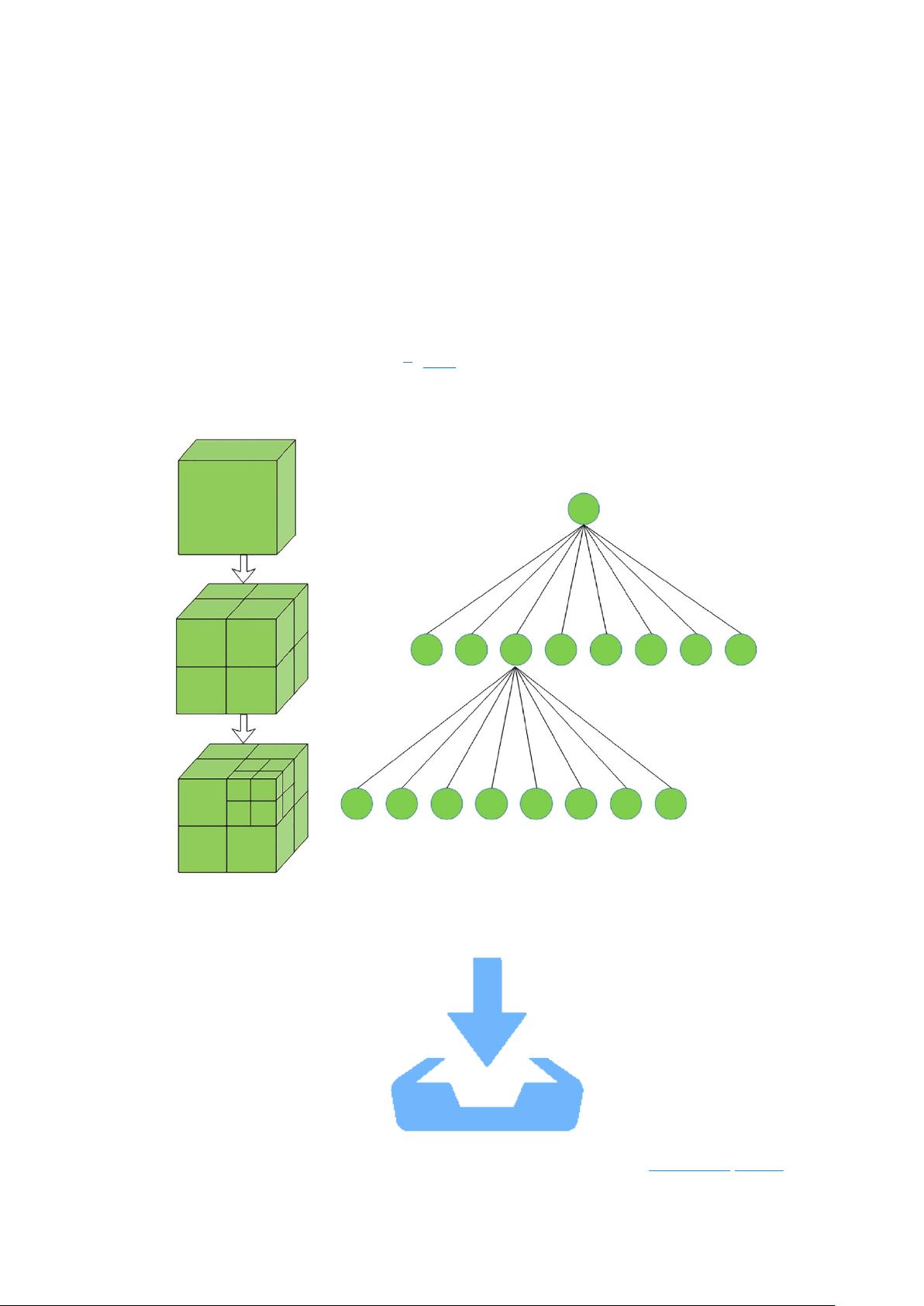
. 图 3 为八叉树分割的示意图, 从递归结构上可以看
出, 该方法使用树遍历算法来查找节点, 并且可以在节点上递归生成新节点, 具有良好的拓
扑结构.
图 3 八叉树分割示意图
Fig. 3 Schematic diagram of octree segmentation
下载: 全尺寸图片 幻灯片
剩余28页未读,继续阅读
2019-09-07 上传
2022-11-28 上传
2022-07-10 上传
2022-11-12 上传
2022-11-04 上传

罗伯特之技术屋
- 粉丝: 4502
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 802.16入网退避算法的设计
- iso C99 standard
- MiniGUI编程指南
- 计算机操作系统(汤子瀛)习题答案
- 《构建高性能Web站点》节选 - 动态脚本加速 - 避免重复编译.pdf
- D语言参考文档,第二版
- 民航订票系统 软件工程
- Oracle Database 10g - DBA
- S3C2410 linux 移植中文手册
- Java语言编码规范(pdf)
- D语言参考手册,第一版
- Data Mining: Practical Machine Learning Tools and Techniques
- jms规范教程,JMS相当的技术规范
- MPEG数字视音频压缩编码原理及应用
- 2008年网络原理试题
- 图形学实验题目(08年)
