Matlab Simulink中RTW代码生成与定点数转换实例
版权申诉
39 浏览量
更新于2024-08-03
收藏 3.21MB PDF 举报
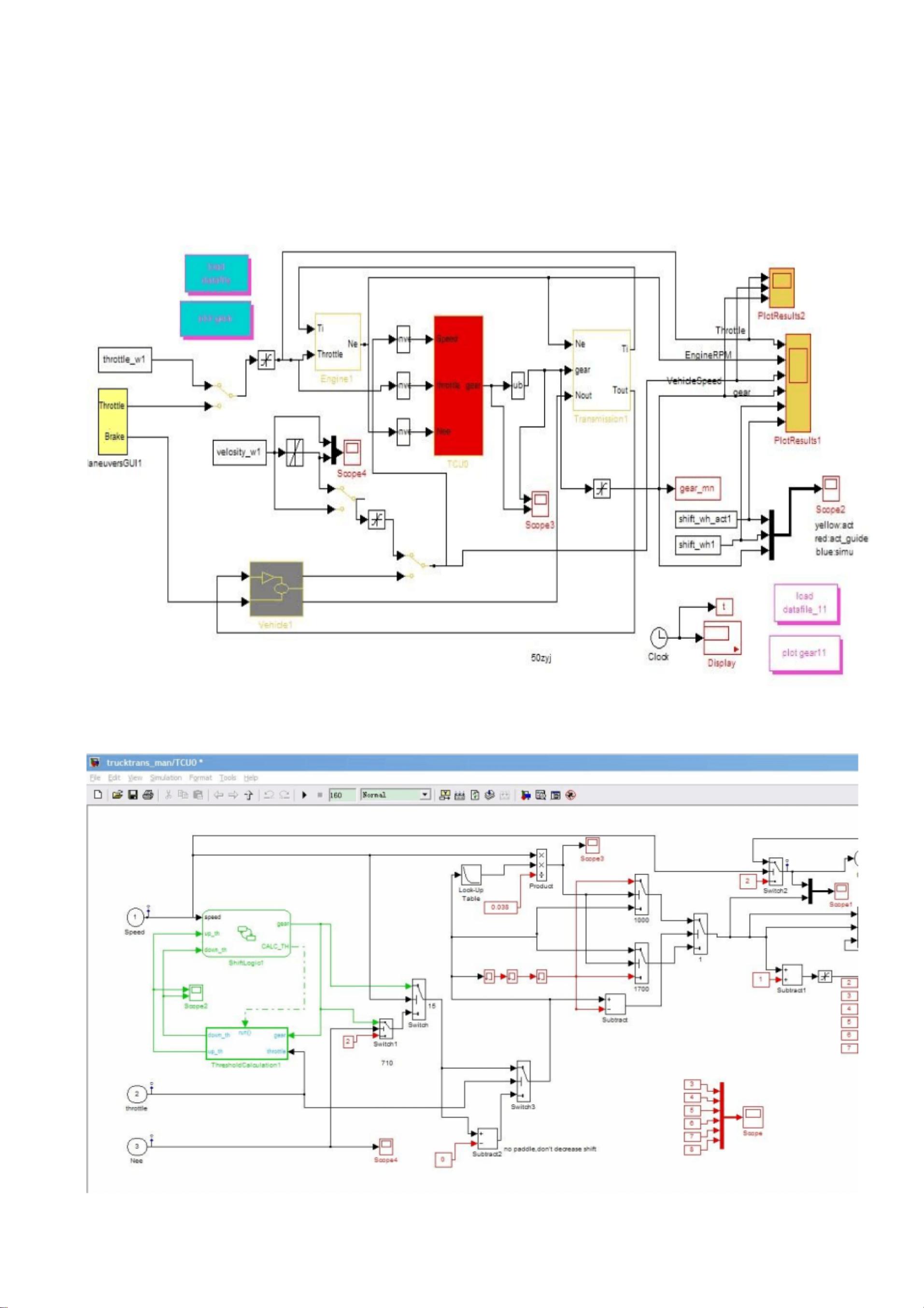
在Matlab Simulink中,生成代码(RTW)对于实现特定硬件接口和控制系统具有重要意义。以一个换挡省油提示系统的项目为例,整个流程涉及以下几个关键步骤:
1. **代码生成准备**:
- 选择模块:首先,双击名为TCU0的模块,进入子模块设置。
2. **配置参数**:
- **Solver设置**:由于项目涉及离散变量操作,选择Fixed-step solver,如ode1(Euler)方法,步长设置为0.004秒(对应4ms),确保与单片机执行周期同步。
- **Tasking模式**:选择SingleTasking以优化任务调度。
- **硬件实施**:选择Infineon C16x Real-time Workshop,并配置目标文件为ert.tlc,选择C语言作为生成代码的语言。
- **生成选项**:勾选"Generatemakefile",指定Make命令为make_rtw,模板makefile为ert_default_tmf。
3. **定点数转换**:
- 在完成配置后,使用Fixed-Point Advisor工具进行定点数转换,确保数据精度和性能。
4. **代码生成**:
- 执行定点数转换检测后,选择"Real-TimeWorkshop/BuildSubsystem",生成C源代码和相关报告。
- 生成的C文件和HEX文件会被保存到指定目录,供后续Keil编译器使用。
5. **代码集成**:
- 将C文件和头文件添加到Keil程序中,确保单片机程序能够正确调用这些生成的代码。
6. **代码调用**:
- 在初始化阶段,通过TCU0_initialize(0)函数进行代码初始化。
- 主程序中,周期性地更新车速(TCU0_U.Speed)、油门开度(TCU0_U.throttle)和转速(TCU0_U.Nee)的值,通过生成的TCU0_step()函数计算期望档位(TCU0_Y.gear)。
总结来说,Matlab Simulink中的RTW工具允许用户将Simulink模型转化为可执行的代码,适应嵌入式系统,通过精确的配置和定点数转换,保证了代码的性能和准确性。这对于实时控制系统的开发和移植至硬件平台至关重要。通过以上步骤,用户能够将Matlab的高级设计直接转化为实际的嵌入式程序,简化了整个开发流程。
Matlab 代码生成 (RTW)
针对换挡省油提示系统项目代码生成过程如下:
双击红色 TCU0模块,进入 TCU0子模块:
下载后可阅读完整内容,剩余7页未读,立即下载
2020-10-22 上传
2021-06-28 上传
2021-07-10 上传
2021-11-01 上传
2019-09-06 上传
2021-07-10 上传
2021-06-28 上传
2021-07-03 上传
2021-10-31 上传


icwx_7550592
- 粉丝: 20
- 资源: 7163
 我的内容管理
展开
我的内容管理
展开







最新资源
- inverse:一种诗意的编程语言,可使用以下方式对着色器进行实时编码
- 行业分类-设备装置-一种六自由度运动平台.zip
- 爱普生L130、L220、L310、L313、L360、L365系列打印机清零软件(附教程)
- auto_BIT_WEB:适用于Ubuntu的自动BIT-Web连接脚本
- Cocoa-Printer-Server:使您的USB打印机成为IP打印机
- Komodo-Sublime-Keybinds:模仿 Komodo 中的 Sublime Text 键绑定以实现平滑过渡
- PartnerShip:对于我们辉煌的PartnerShip仪表板
- sosse:使用Lil Sosse为您的服务器增添色彩
- 行业分类-设备装置-一种全自动调节式防伪纸张过数装置.zip
- 易语言高性能哈希表-易语言
- phaser_drawing_app
- tarebears
- 数学建模源码集锦-基于遗传算法的BP神经网络优化算法应用实例.zip
- PKCS7标准文档中英文翻译.zip
- redux-stuff:使用redux Slices和Thunks玩耍
- assessment
