二阶系统时域分析:从特征根到单位阶跃响应
版权申诉
134 浏览量
更新于2024-07-01
收藏 1.76MB PPTX 举报
"自动控制原理:第8讲(第三章 二阶系统时域分析).pptx"
自动控制原理中的二阶系统时域分析是控制理论中的核心概念,主要研究二阶动态系统的响应特性。本讲主要围绕二阶系统的微分方程、传递函数以及系统参数对性能的影响进行深入探讨。
首先,二阶系统是指其动态行为由二阶微分方程描述的控制系统。这个微分方程通常以如下形式表示:
\[ \ddot{x}(t) + 2\zeta\omega_n\dot{x}(t) + \omega_n^2x(t) = u(t) \]
其中,\( \ddot{x}(t) \) 是加速度,\( \dot{x}(t) \) 是速度,\( x(t) \) 是位置,\( u(t) \) 是输入,\( \zeta \) 是阻尼比,\( \omega_n \) 是自然振荡频率。通过传递函数,我们可以将二阶系统转换为更通用的形式,以便于分析。
在Simulink环境中,可以通过改变系统参数K和T来观察系统响应的变化。K是增益,T是时间常数,它们共同决定了系统的动态特性。将系统表示为标准形式,即闭环传递函数为:
\[ G_c(s) = \frac{K}{s^2 + 2\zeta\omega_n s + \omega_n^2} \]
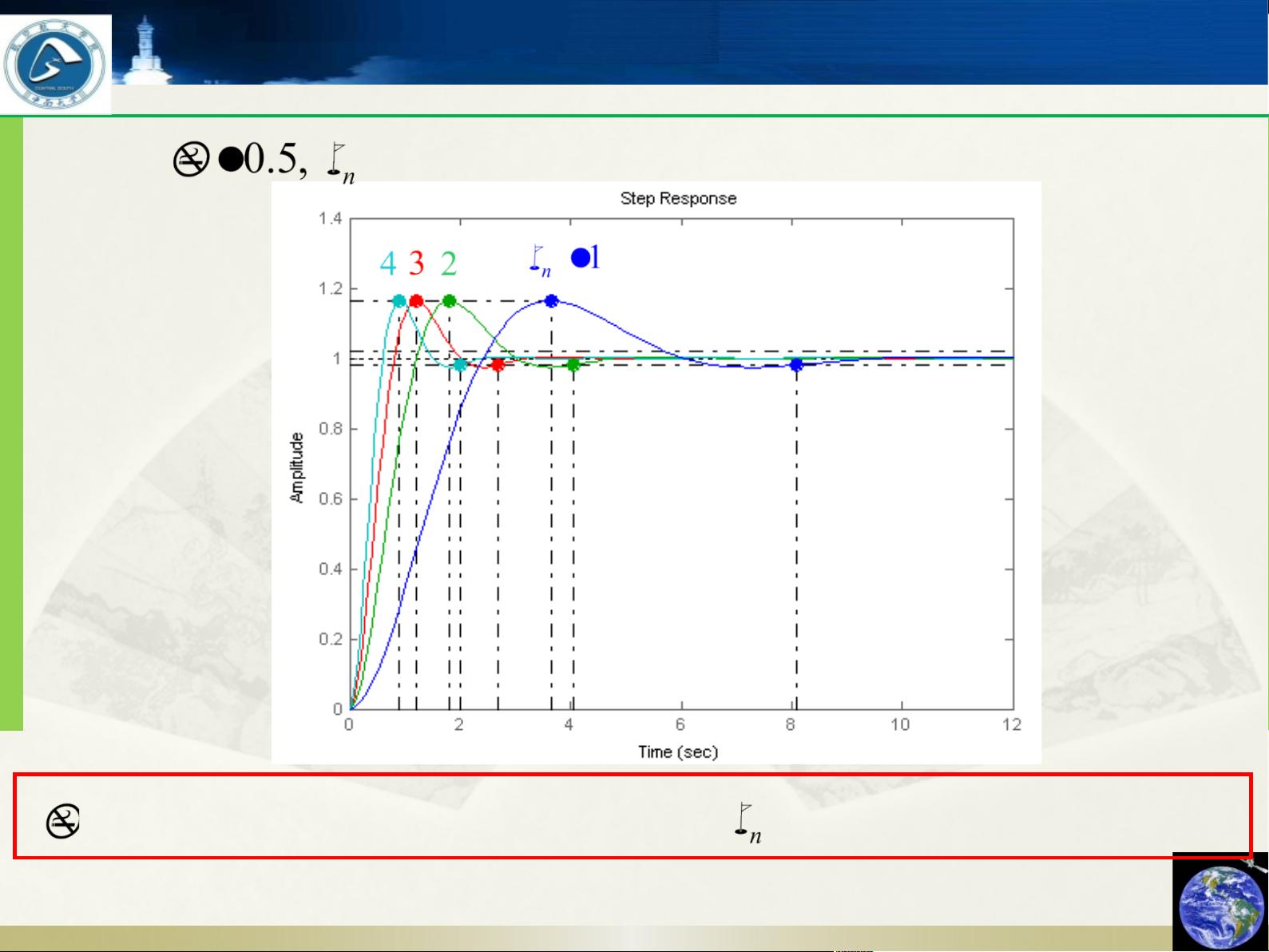
二阶系统的两个关键参数是自然振荡频率\( \omega_n \)和阻尼比\( \zeta \)。自然振荡频率描述了系统在没有阻尼情况下的自由振荡频率,而阻尼比则决定了系统衰减振荡的速度。系统的响应特性,如上升时间、超调量和调节时间,完全由这两个参数决定。
根据闭环特征方程:
\[ s^2 + 2\zeta\omega_n s + \omega_n^2 = 0 \]
二阶系统的特征根可以是两个共轭复数、两个相等的实数或一对正实数。不同类型的特征根对应着不同的系统响应特性:
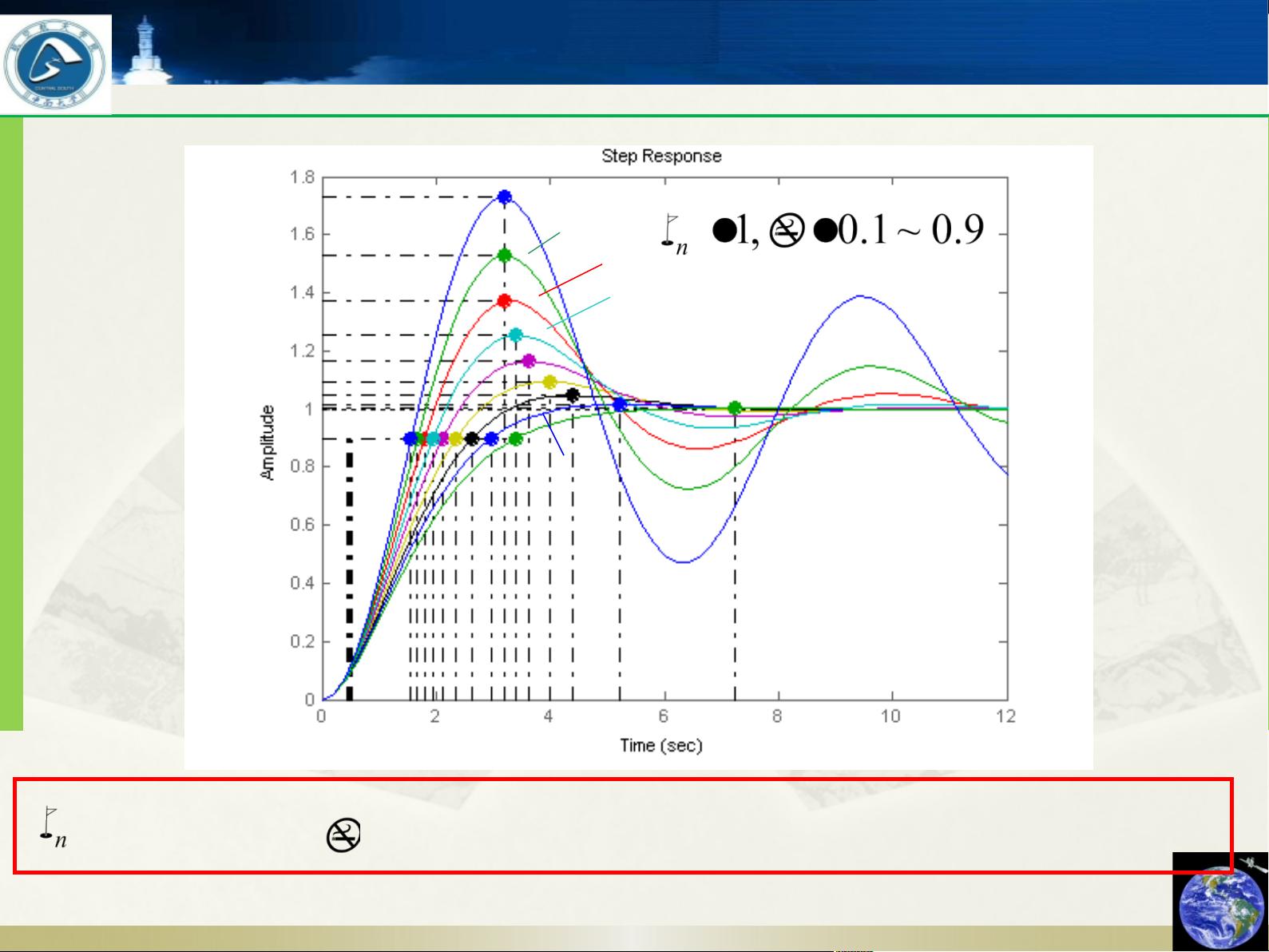
1. 欠阻尼系统(\( 0 < \zeta < 1 \)):特征根为一对共轭复数,表现为衰减的正弦振荡。超调量和衰减速率都与阻尼比有关,阻尼比越大,衰减越快,超调量越小。
2. 临界阻尼系统(\( \zeta = 1 \)):特征根为两个相等的实数,响应无振荡,单调上升,达到稳态值的速度最快。
3. 过阻尼系统(\( \zeta > 1 \)):特征根为两个不相等的实数,响应呈现非振荡的指数衰减,达到稳态值的速度较慢。
通过Simulink仿真和理论分析,我们可以清晰地看到这些不同阻尼状态下的系统响应。例如,当增加阻尼比时,系统的响应速度会变慢,超调量减小;反之,减小阻尼比会使得系统响应更快,但可能会导致更大的超调。
二阶系统时域分析是理解和设计控制系统的关键步骤,它帮助我们理解和优化系统的动态行为,以满足特定的性能指标,如快速性、稳定性、抗干扰能力等。通过调整系统参数,可以实现对系统性能的有效控制,从而在实际工程应用中实现精确的控制效果。
126 浏览量
2022-07-12 上传
2024-06-29 上传
2021-09-17 上传
2021-09-24 上传
474 浏览量
177 浏览量

wxg520cxl
- 粉丝: 25
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







