




小车曲线规划Matlab与Simulink仿真教学详解
版权申诉
PPTX格式 | 9.35MB |
更新于2024-07-02
| 163 浏览量 | 举报
本资源主要探讨的是小车曲线规划仿真的实现过程,通过MATLAB函数和Simulink模块进行设计与教学。首先,我们关注于小车的运动规划,利用B样条曲线来定义小车的轨迹。MATLAB函数`cal_P(s)`是一个关键部分,它接受参数`s`作为输入,计算并返回小车在不同位置的坐标(x(s), y(s)),速度绝对值|V(s)|,以及方位角θ(s)。这个函数展示了如何将数学模型转化为实际可执行的代码。
在Simulink模块中,步骤详细地指导了如何构建和配置小车控制系统。从点击红圈按钮打开元件库开始,用户需要选择并添加各种组件,如数学运算、信号处理、控制算法等,这些元件用于模拟小车的运动学和动力学行为。例如,通过将`sin`函数替换为自定义函数`cal_P(u)`,以及调整参数值,可以定制小车按照特定的规划路径跟踪。
模块中还涉及到了图形化界面的调整,如修改参数、反转模块方向以及设置条件判断,这些都是为了确保仿真的精确性和灵活性。用户可以通过这些操作,观察小车如何响应不同的规划策略,并进行实时的性能分析和优化。
整个过程中,不仅涵盖了理论模型的建立,还强调了实际软件工具的运用,这对于理解和实践小车控制系统的动态仿真具有很高的教学价值。通过这个资源,学习者可以掌握如何用MATLAB和Simulink进行小车曲线路径规划,提升其在自动化控制领域的实践能力。
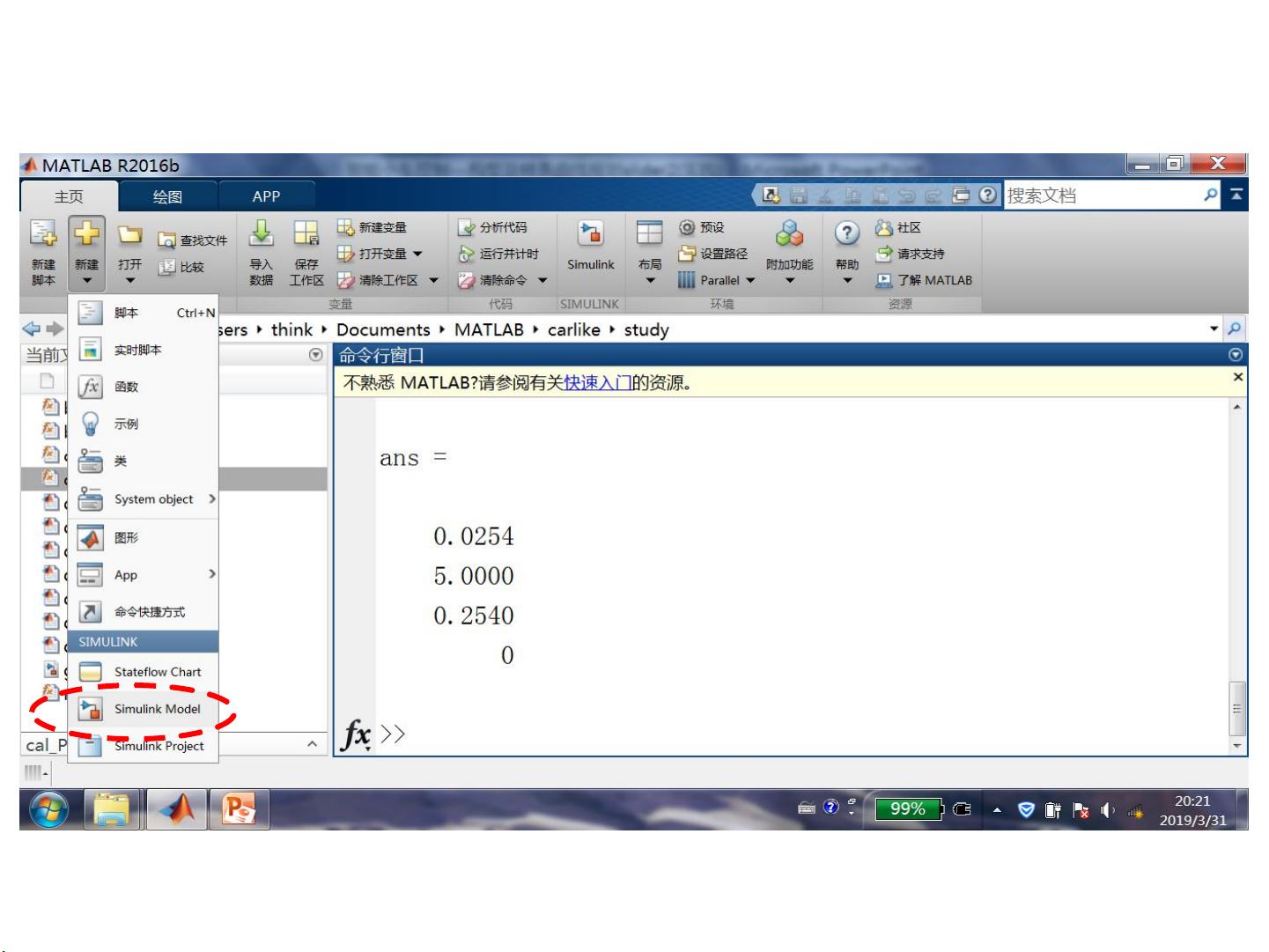
2.2 小车规划 Simulink 模块
(2)
点击红圈按钮
下载后可阅读完整内容,剩余34页未读,立即下载
相关推荐





CAE工作者
- 粉丝: 230
 我的内容管理
展开
我的内容管理
展开








最新资源
- 植物大战僵尸网页版开发历程与源码解读
- 表格动态正序倒序交互的实现方法
- 掌握SWFObject 2.2:简化Flash嵌入与搜索引擎优化
- mousearound:掌握鼠标交互的单事件处理库
- 构建学籍管理系统:VB与SQL Server 2000数据库应用
- Javascript动态导航特效合集
- GT1游戏树算法:SoSe 2015 M5.1版本实现
- 7zip压缩软件:64位Windows系统的强大工具
- VB上位机实现HID温度监测与18B20数据读取
- Android完整版:AAC文件录制及处理指南
- JavaScript实现的导航条特效全展示
- C语言堆排序算法实现及VC工具应用
- Kraken: 基于Gatling的Java后端负载测试IDE
- 全面解析计算机硬件接口及其定义
- ASP.NET实现无刷新页面的技术解析
- 精通JavaScript制作关联菜单特效






















