MATLAB与Simulink:打造自动驾驶新体验的关键工具与功能
需积分: 9 82 浏览量
更新于2024-06-28
收藏 3MB PDF 举报
MATLAB和Simulink是两种广泛应用于系统建模、仿真和控制的高级工具,在自动驾驶技术的发展中扮演了关键角色。本文着重介绍了MATLAB和Simulink在自动驾驶领域的最新特性和应用,特别关注于解决自动驾驶工程师面临的几个核心问题。
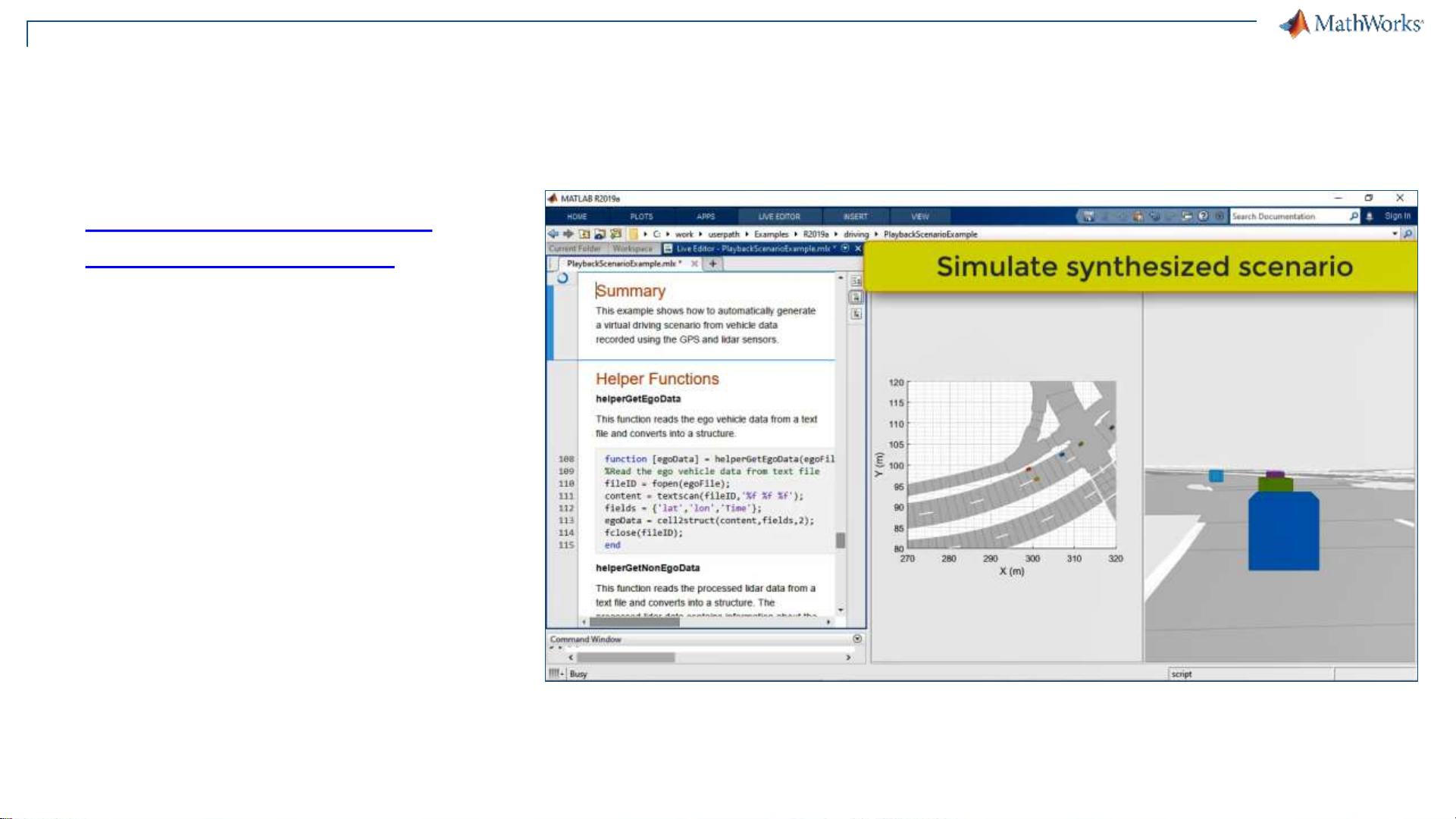
首先,创建虚拟驾驶场景是开发过程中的重要环节。利用MathWorks提供的DrivingScenarioDesigner工具,工程师可以直观地构建道路、车道线、车辆和行驶轨迹,设定车辆尺寸和雷达截面积(RCS),以及生成传感器的目标信号。此外,该工具还支持OpenDRIVE格式的路网导入,以便快速搭建真实世界的仿真环境。
其次,Simulink作为核心仿真平台,提供了如TestOpen-LoopADASAlgorithm和LaneFollowingControlwithSensorFusion等功能。TestOpen-LoopADASAlgorithm允许用户编辑驾驶场景并在Simulink中实时运行,通过添加各种传感器模型,如摄像头、雷达或激光雷达,进行传感器数据的处理和输出可视化。而LaneFollowingControlwithSensorFusion则更进一步,不仅实现了车道保持和间距管理的模型预测控制,还支持传感器融合技术,这有助于提高决策的精确性和可靠性。
设计阶段,Simulink的强大之处在于其能够将仿真模型无缝集成到实际硬件环境中,通过EmbeddedCoder将设计转换为C/C++代码,实现软硬件结合的软件在环(SIL)测试,确保算法的性能和系统的安全性。
最后,早期版本的Simulink模型和第三方工具如ROS (Robot Operating System)、CAN (Controller Area Network)、AUTOSAR (Automotive Open System Architecture)等也被广泛采用,以支持不同层面的通信和标准化接口,促进了自动驾驶系统中不同模块的协作和互操作性。
MATLAB和Simulink通过提供图形化工具、强大的仿真能力以及与多种专业算法和标准平台的兼容性,为自动驾驶工程师创造了一个高效、灵活且可信的开发平台,助力他们在不断变化的自动驾驶技术领域推进创新。
12
Model-Based Design and Code Generation
for AEB Sensor Fusion
1.5M km of recorded data
3+ years of driving time
12 hours re-simulation
剩余70页未读,继续阅读
2023-06-18 上传
点击了解资源详情
522 浏览量
141 浏览量
1270 浏览量
150 浏览量

电气_空空
- 粉丝: 5303
 我的内容管理
展开
我的内容管理
展开







最新资源
- DES加密解密工具:安卓平台上轻松实现数据保护
- toqito:量子信息理论研究的Python工具包
- 最新FFmpeg工具包:视频处理与播放的终极解决方案
- 「hello-world2」新测试分支的功能验证
- 提高CRFID传输速率的EPC协议创新方法研究
- 实现ViewPager无限循环的两种简便方式
- 下载Atom编辑器官方Windows汉化版,轻松编写CSS/HTML/JavaScript代码
- 新手友好:Notepad++成为C++学习首选工具
- C#初学者如何用窗体代码计算圆周率
- 基于.NET Core的CRUD模板快速开发解决方案
- JunkratCouncil官方网站,专注CSS设计的展示平台
- 高效实现导航小姐姐说话动作的3D模型动画教程
- 打造个性化牛津电子词典:完整A-Z分类的TXT词库
- XshellXftpPortable:免安装版提供一体化管理体验
- 易语言实现获取文件目录大小的脚本教程
- 开源正常运行时间监控器与状态页面:B Bentley Herron的实现
