YDLIDAR X2 激光雷达开发与使用指南
需积分: 0 163 浏览量
更新于2024-07-06
2
收藏 1.25MB PDF 举报
"YDLIDar X2 使用手册"
YDLIDAR X2 是一款由深圳玩智商科技有限公司生产的激光雷达,适用于机器人导航、自动驾驶、无人机避障等应用场景。这款雷达配备了一个开发套件,旨在帮助用户进行性能评估和快速开发。开发套件包括主要组件如下:
1. **X2激光雷达**:内含电机驱动,能实现对电机的精确控制,提供连续的环境扫描数据。
2. **USB Type-C 数据线**:用于连接X2雷达和PC,同时承担供电和数据传输的功能。
3. **USB转接板**:具有USB转UART功能,简化设备与PC的连接,支持DTR信号控制雷达电机启停,并包含一个MicroUSB电源接口(PWR),用于辅助供电。
在Windows系统下,使用YDLIDAR X2的步骤如下:
- **设备连接**:通过USB Data接口将X2与PC相连。
- **驱动安装**:安装必要的驱动程序以识别设备。
- **使用评估软件**:启动扫描,收集和展示点云数据,支持数据保存、均值和标准差显示,以及播放、录制和调试功能,还提供了滤波选项以优化数据质量。
在Linux环境下,结合ROS(Robot Operating System)进行操作:
- **设备连接**:同样使用USB Data接口连接雷达。
- **编译并安装YDLIDAR-SDK**:获取源代码并编译,以便与雷达通信。
- **ROS驱动包安装**:安装相应的ROS驱动,如ydlidar_ros_driver。
- **运行ROS驱动**:启动驱动程序,使雷达与ROS节点通信。
- **RVIZ查看扫描结果**:利用ROS可视化工具RVIZ展示雷达扫描的3D点云。
- **修改扫描角度**:根据需要调整雷达的扫描范围和方向。
使用时需注意以下事项以确保雷达正常工作:
- **环境温度**:确保雷达工作在合适的温度范围内,过高或过低的温度可能影响其性能。
- **环境光照**:避免强光直射,以免干扰雷达的测距性能。
- **供电需求**:确认提供的电源能满足雷达的功率要求,必要时使用辅助供电接口。
修订历史未给出,但手册的版权信息显示自2015年至2021年,这表明手册可能经过多次更新以适应产品改进和技术发展。
YDLIDAR X2是一款全面的激光雷达解决方案,提供了详尽的开发指南,便于用户在不同操作系统下进行集成和应用开发。
Copyright 2015-2021 EAI
2 / 14
2 WINDOWS 下的使用操作
2.1 设备连接
在 windows 下对 X2 进行评估和开发时,需要将 X2 和 PC 互连,其具体过程如下:
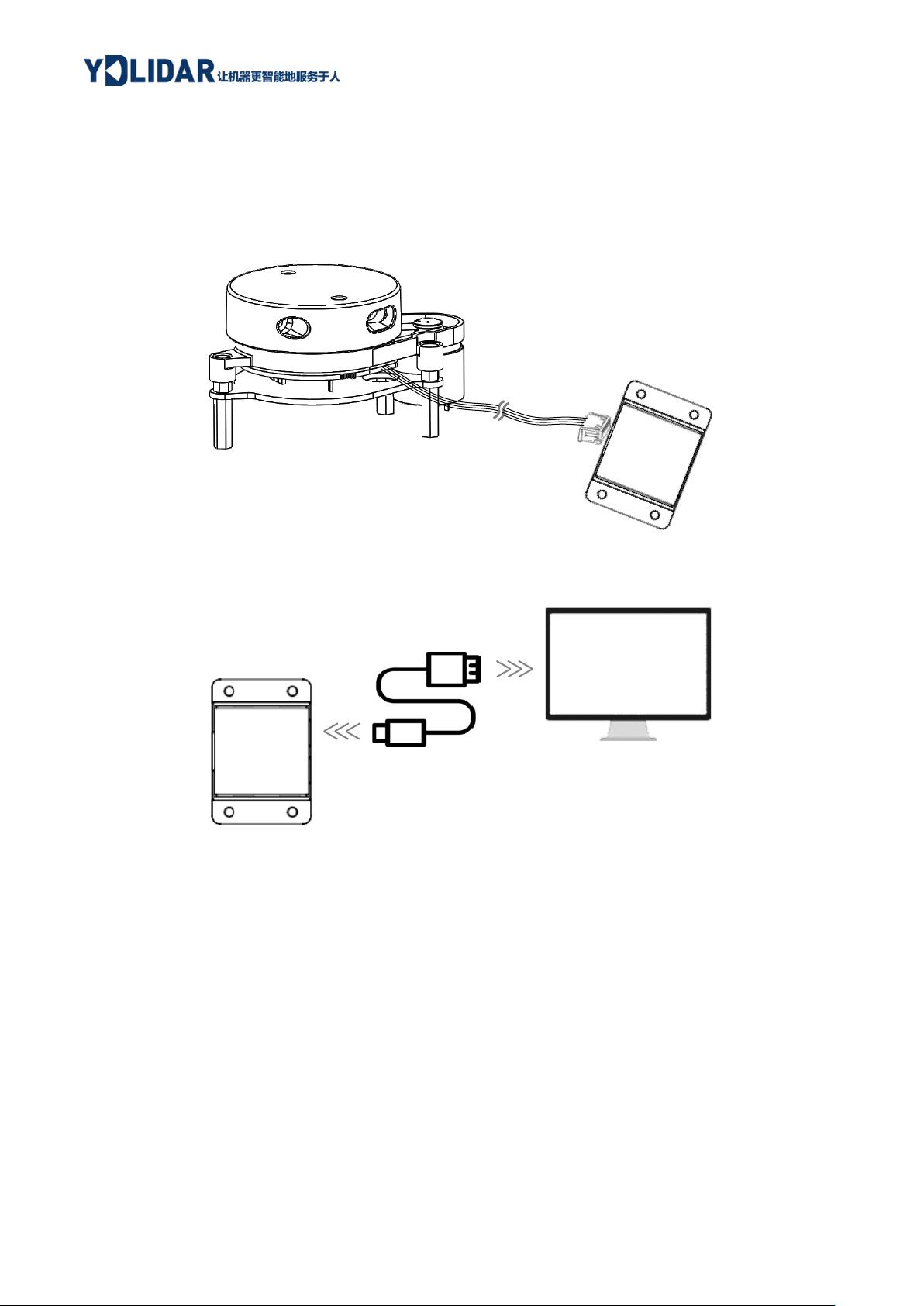
图 2 YDLIDAR X2 设备连接 STEP 1
图 3 YDLIDAR X2 设备连接 STEP 2
先将转接板和 X2 接好,再将 USB 线接转接板和 PC 的 USB 端口上,注意 USB 线的 Type-C
接口接 USB 转接板的 USB_DATA,且 X2 上电后进入空闲模式,电机不转。
部分开发平台或 PC 的 USB 接口的驱动电流偏弱,X2 需要接入+5V 的辅助供电,否则雷达
工作会出现异常。
剩余15页未读,继续阅读
727 浏览量
791 浏览量
854 浏览量
450 浏览量
2025-01-08 上传
2025-01-08 上传

General5219
- 粉丝: 25
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 电信设备-基于手机信令数据的出行者职住地识别与出行链刻画方法.zip
- atom-ide-deno:deno对Atom-IDE的支持
- torch_sparse-0.6.2-cp36-cp36m-linux_x86_64whl.zip
- priceGame
- PsynthJS:用于在 Psymphonic Psynth 中生成图形的开源库
- Arca:Projeto do7ºperiodo
- java并发.rar
- 企业文化创新(4个文件)
- kdit:[镜像]-由Kotlin编写并由JavaFX支持的基于短键的简约文本编辑器
- 播客
- 珍爱生命,创建平安校园演讲稿
- NoSpoilTwi-crx插件
- 取EXE程序图标ICO.rar
- Row-oriented-Tuple-Indexer:一个库,用于构建常规的数据库数据结构,例如page_list(数据页的链接列表),b_plus_tree和hash_table
- Hadoop-Analytics---RHadoop
- torch_spline_conv-1.2.0-cp38-cp38-linux_x86_64whl.zip
