飞思卡尔智能车制作指南:从入门到精通
需积分: 9 52 浏览量
更新于2024-07-27
收藏 1.91MB PDF 举报
本文是针对飞思卡尔新手入门的解决方案,主要涵盖了基于飞思卡尔芯片的智能循迹车的制作过程,以及一个入门级别的智能车方案——基于STC89C52单片机的智能小车。内容包括硬件选择、传感器应用、电机驱动、速度检测、调试策略等多个方面,旨在帮助初学者高效地制作出智能小车。
一、飞思卡尔智能循迹车
1. 智能循迹车介绍:飞思卡尔智能小车是一种集成了微控制器、传感器和执行机构的自动化设备,用于跟踪特定路径。
2. 摄像头组方案:介绍了CMOS模拟和数字摄像头的选择与应用,两种类型的摄像头在图像采集和处理上有不同的特点。
3. 光电组方案:包括红外传感器和激光传感器,分别讲解了它们的工作原理和在路径识别中的作用。
4. 电磁组方案:探讨了工型电感传感器、色环电感传感器的使用,并涉及硬件设计。
5. 道路识别策略:阐述了三种传感器的信号采集方法,用于确定小车的行驶方向。
6. 电机驱动:讲解如何控制电机,确保小车平稳运行。
7. 速度检测:讨论了检测小车速度的方法,以实现精确控制。
8. 调试策略:提供了速度调试和综合调试的方法,帮助解决实际操作中可能出现的问题。
二、STC89C52单片机智能小车
1. 简介:介绍了基于STC89C52单片机的简单智能小车方案。
2. 循迹方案:包括红外传感器和激光传感器两种不同方式,分别适用于不同的追踪需求。
3. PWM驱动电机:通过中断调制改变PWM占空比,控制直流电机的速度和方向。
4. 舵机控制:介绍了舵机的工作原理、应用和如何利用中断调制PWM驱动舵机。
5. 数码管显示:讲解数码管的基本原理和在小车上的应用,用于显示信息。
6. LED流水灯:介绍了LED灯的控制电路,可以作为视觉效果的一部分。
7. 液晶显示:包括1602和12864两种液晶显示屏,详细描述了它们的技术参数、接脚定义、操作时序和电路连接方法。
8. ADC0804:介绍了模数转换器ADC0804的使用,用于将模拟信号转化为数字信号。
9. DAC0832:讲解了数模转换器DAC0832,用于将数字信号转化为模拟信号。
10. I2C总线:简述了I2C通信协议,便于实现设备间的低速串行通信。
11. 矩阵控制:如何利用矩阵键盘进行多按键输入。
12. 蜂鸣器控制:介绍了蜂鸣器的工作原理和控制方法,用于发出声音提示。
这份资料为初学者提供了一套完整的飞思卡尔智能小车制作指南,从基础的硬件选择到复杂的控制系统设计,涵盖了多个方面的知识,是学习嵌入式系统和智能控制的宝贵参考资料。通过实践这些内容,不仅能够提升理论知识,还能锻炼动手能力和问题解决能力,对于参与类似飞思卡尔智能汽车竞赛的选手来说,是非常有益的学习材料。

探讨机电一体化及自动化专业人才培养的入门方案
4
3、光电组方案
(1)红外传感器
红外传感器制作简单,成本低廉,作为入门级别的传感器,给参赛者提供了
很大的方便。
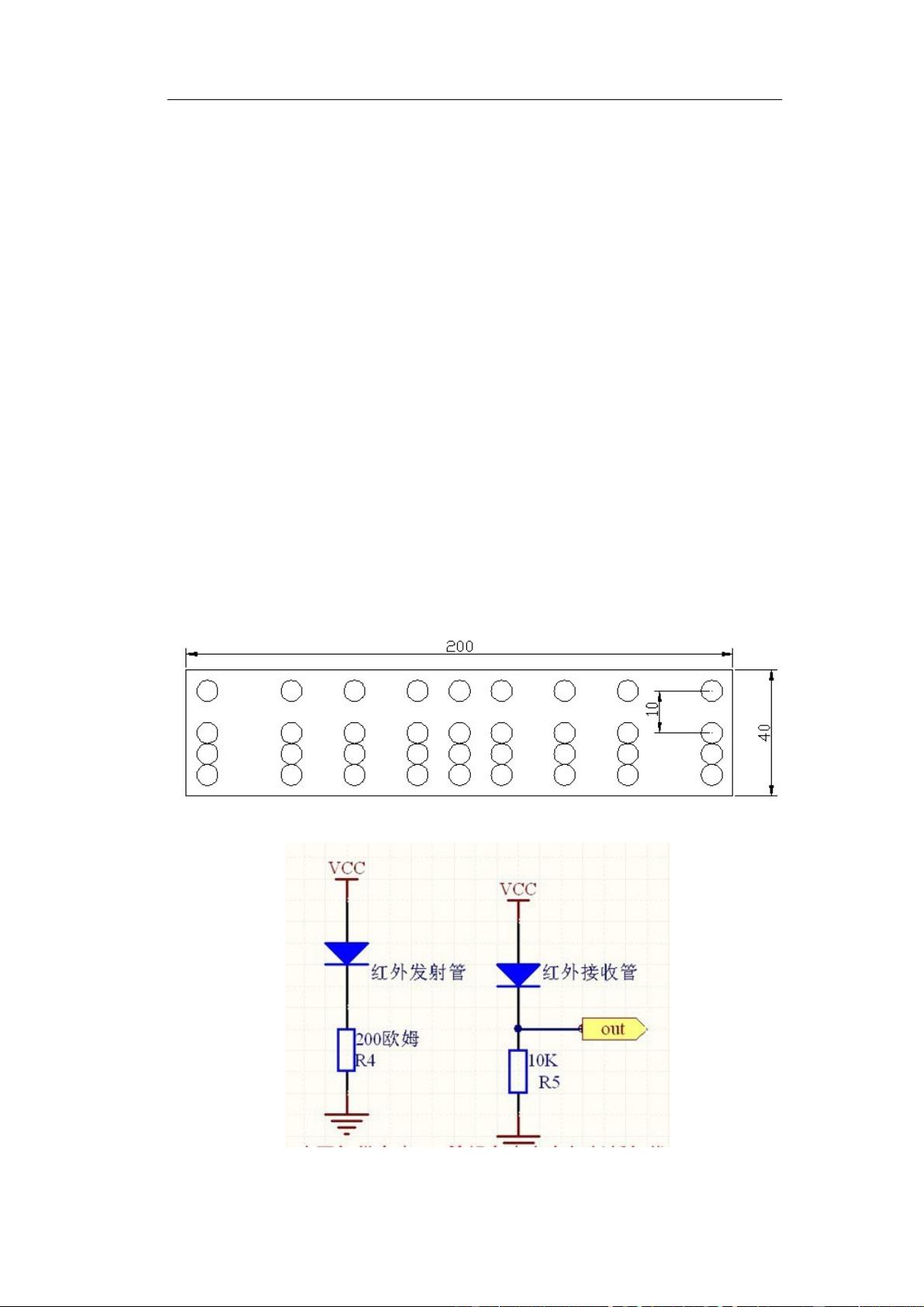
红外发射管发出的为波长 940nm 的光线,需要使用红外接收管接受该光线。
下图是市场上最常见的两种红外传感器,其一是发射接受分开的红外对管,其二
是发射接受集成在一起的红外管。
图3.0 普通红外发射头 图3.1 普通红外接收头
图3.2 红外发射接收一体管
如果使用发射接收一体管,可以设计成单排垂直照地的模式。根据调试经验,
可以设计成两个传感器之间相对窄一点,大概 1-2cm 之间,传感器个数可以适当
多几个,9-11 个均可以。
使用普通的发射管跟接收管(发射接收分开的),这种传感器性能优异,可
以对前方 40cm 的斜面进行路况探测或物体探测。工作稳定可靠,抗干扰能力强。
剩余40页未读,继续阅读
2010-04-23 上传
2019-07-24 上传
2017-03-14 上传
2011-07-01 上传
2014-08-26 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

ring1992
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 用DS1302与12864LCD设计的可调式中文电子日历_单片机C语言实例(纯C语言源代码).zip
- set border body for some websites-crx插件
- 输入密码专用的虚拟软键盘VB源程序
- 所有时刻:计算单个光谱或整个光谱集的第 0、1 和 2 时刻-matlab开发
- stv0900_reg,人工智能 matlab源码,matlab源码下载
- Fikirtepe-学生信息系统:带有Spring Boot和Gradle的学生信息系统
- 使用html5得到手机设备信息的.zip项目安卓应用源码下载
- Hướng dẫn KUBET - THABET-crx插件
- Technical-Test
- Python库 | pyjsonpath-1.0.9.tar.gz
- react-source-learn:react16原始代码学习学习记录
- prototype2:简单的垂直滚动条
- 求角:给定顶点时,求三角形和/或四边形的角。-matlab开发
- validator:WME验证程序源文件
- Disrupting to Working In-crx插件
- uv_mmrs,matlab中怎么查看源码,matlab源码下载
