Python动态物体颜色检测详解:OpenCV实现动态追踪
132 浏览量
更新于2024-08-31
收藏 200KB PDF 举报
"这篇文章主要讲解了如何使用Python和OpenCV来检测动态物体的颜色,并通过图像对比定位物体。适用于树莓派或单片机追踪项目,也可用于监控场景。"
在物体检测领域,目标识别和分割是关键,尤其在复杂场景中,实时处理多个目标的能力至关重要。随着计算机技术的发展,动态目标追踪在各个领域都有广泛应用,例如智能监控系统、军事侦察以及医疗导航等。
在本文中,作者并不追求复杂的算法,而是利用Python和OpenCV库,通过图像帧之间的差异来检测动态物体。首先,导入所需的库,如`cv2`(OpenCV)和`numpy`。然后,初始化摄像头并获取第一帧图像,将其保存以便后续与新帧进行比较,从而找出变化的部分。
为了检测动态物体,作者采用的方法是帧间差分。在每帧之间计算差值,动态部分的像素值会有较大变化。通过设定阈值,可以确定哪些像素变化属于动态物体。例如,定义一个区域(x, y, w, h)来框选可能的动态物体。
接下来,文章提到颜色检测的部分。在计算机视觉中,颜色通常用HSV(色调、饱和度、亮度)空间表示,因为它更符合人类对颜色的认知。作者给出了一个例子,如何定义和检测特定颜色,如黑色。HSV颜色空间中,黑色的范围是从0,0,0到180,255,46。为了存储和处理这些颜色,创建了一个数组和字典映射。
```python
lower_black = np.array([0, 0, 0])
upper_black = np.array([180, 255, 46])
color_mask = cv2.inRange(frame, lower_black, upper_black)
```
这里,`lower_black`和`upper_black`定义了黑色的HSV范围,`cv2.inRange()`函数用于创建一个二值掩码,将图像中对应颜色范围的像素设为白色,其余设为黑色。
最后,通过掩码与原始图像进行与操作,可以得到只包含黑色物体的图像。这个过程可以扩展到其他颜色,实现对不同颜色物体的检测和追踪。
本文提供了一个基础但实用的动态物体颜色检测方法,利用Python和OpenCV,适合初学者理解动态目标检测的基本原理。通过这种方法,可以应用于简单的追踪系统或者监控场景,通过颜色判断进一步增强物体识别的能力。
基于基于Python检测动态物体颜色过程解析检测动态物体颜色过程解析
主要介绍了基于Python检测动态物体颜色过程解析,文中通过示例代码介绍的非常详细,对大家的学习或者工作
具有一定的参考学习价值,需要的朋友可以参考下
本篇文章将通过图片对比的方法检查视频中的动态物体,并将其中会动的物体定位用cv2矩形框圈出来。本次项目可用于树莓
派或者单片机追踪做一些思路参考。寻找动态物体也可以用来监控是否有人进入房间等等场所的监控。不仅如此,通过对物体
的像素值判断分类,达到判断动态物体总体颜色的效果。
引言引言
物体检测,是一种基于目的几何学和统计资料特点的影像拆分,它将目的的拆分和辨识,其准确度和实时性是整个该系统的一
项最重要战斗能力。特别是在是在简单桥段中的,必须对多个目的展开实时处理时,目的系统会萃取和辨识就变得尤其最重
要。
随着计算机的持续发展和计算机系统感官基本原理的应用,建模数据处理新技术对目的展开动态追踪研究工作更加受欢迎,对
目的展开静态动态追踪整合在信息化公交系统、人工智能监视该系统、军事战略目的检验及药学导航系统手术后中的手术器械
整合等各个方面具备普遍的应用于商业价值。
开始前的准备开始前的准备
而这里显然我们没必要做到如此高深的地步,而是借助python和OpenCV通过图片相减的方法找到动态物体,然后根据像素值
的大小判断其中的均值颜色。
import cv2
import numpy as np
import collections
import time
下面是读取摄像头:
camera = cv2.VideoCapture(0)
做一些开始前的准备,包括循环次数,摄像头内容读入,保存上一帧的图片作为对比作差找到动态物体,然后定义框架的长和
宽。
firstframe = None
a=0
ret0,frame0 = camera.read()
cv2.imwrite("1.jpg",frame0)
x, y, w, h = 10,10,100,100
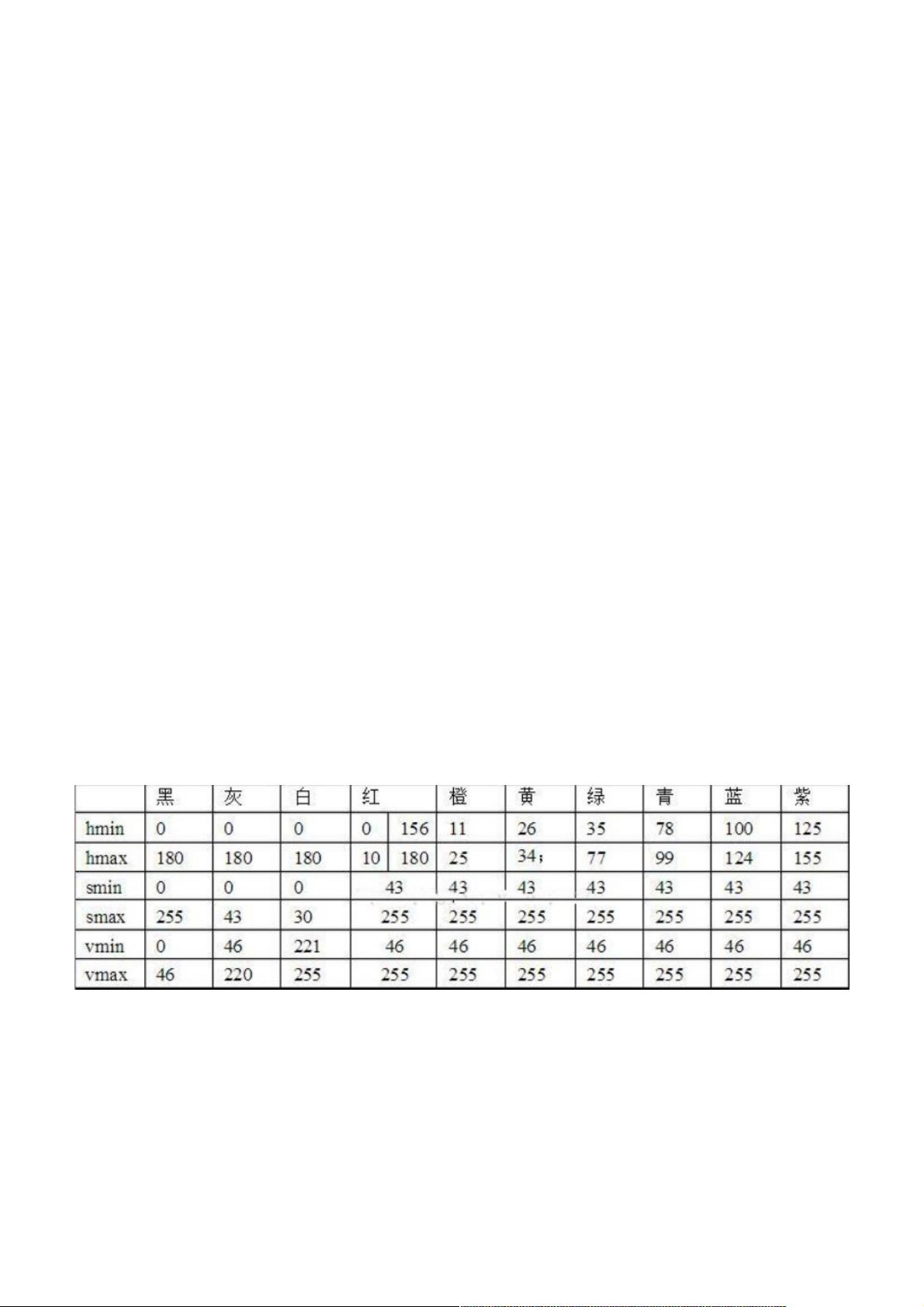
下面是定义颜色的部分代码,比如定义的黑色,可以参照hsv表进行拓展,如图所示
然后可以知道黑色的最低值为0,0,0,最大值为180,255,46然后建立数组存储颜色数据,通过字典达到映射效果。
# 处理图片
def get_color(frame):
print('go in get_color')
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
maxsum = -100
color = None
color_dict = getColorList()
for d in color_dict:
mask = cv2.inRange(frame, color_dict[d][0], color_dict[d][1])
cv2.imwrite(d + '.jpg', mask)
binary = cv2.threshold(mask, 127, 255, cv2.THRESH_BINARY)[1]
binary = cv2.dilate(binary, None, iterations=2)
img, cnts, hiera = cv2.findContours(binary.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
sum = 0
下载后可阅读完整内容,剩余3页未读,立即下载
242 浏览量
132 浏览量
2021-08-26 上传
128 浏览量
2024-06-27 上传
点击了解资源详情
148 浏览量
点击了解资源详情

weixin_38656103
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 什么值得买PC客户端v1.0正式发布:网购性价比神器
- icontract:提升Python3合同式编程的违规消息与继承支持
- 全面解析Activity间对象传递的三种技术手段
- Python 3.5.2 Windows 64位安装包发布及中文手册下载
- MD风格SearchView开发教程及效果展示
- 海淘购物必备!运费计算器v1.0绿色免费版详解
- JavaScript源码分享:LaChouetteAgence项目解析
- Angular CLI在开发服务器中的应用与测试指南
- 掌握oracle sqluldr2快速导出工具高效使用
- 基于Servlet和JSP的分页管理演示系统
- 剑儿淘宝购物小助手v3.9:购物便利神器,返利省钱高效
- Java爬虫实现URL图片尺寸获取教程
- 宿舍记账管理:权限分角色与支出自动分摊系统
- 个人网站构建与维护指南:使用Next.js与TypeScript
- Java自学资源包:2020最新版教程及项目实践
- 阶梯电费计算器V2.0:绿色版免费软件解析电价政策
