尺度空间不变特征:SIFT算法详解与应用
需积分: 9 22 浏览量
更新于2024-07-20
收藏 764KB DOC 举报
SIFT算法(Scale-Invariant Feature Transform)是一种经典的计算机视觉技术,由David Lowe在2004年提出。该算法的核心在于设计一种能够提取图像中尺度不变且具有旋转不变性的特征,以便在多种场景变化下进行可靠的图像匹配和物体识别。以下是SIFT算法的主要组成部分和工作流程:
1. **尺度空间极值检测**:SIFT从尺度空间的角度出发,首先通过高斯滤波器对图像进行多尺度分析,以捕捉不同尺度下的特征点。通过对图像进行高斯金字塔构造,算法能够在不同尺度下检测到潜在的特征点,这些点具有一定的尺度不变性。
2. **关键点定位与稳定度评估**:在每个可能的特征点位置,算法会应用精确的模型拟合来确定位置和尺度,并基于关键点在不同尺度下的重复出现和稳定性选择关键点。稳定的关键点在图像变化中更有可能保持不变,这保证了特征的可靠性。
3. **方向描述**:SIFT通过计算关键点附近区域的局部梯度方向,为每个关键点分配一个或多个方向。这一步骤确保了在旋转和局部视角变化下的特征不变性,因为所有后续处理都是相对于关键点的坐标系进行的。
4. **关键点描述子**:在选定的尺度上,SIFT通过测量关键点周围区域的局部灰度梯度分布,生成一个独特的描述符,这个描述符包含了关键点的形状、纹理等信息。描述符的生成是SIFT算法的关键部分,它使得即使在噪声和光照变化的情况下,也能准确匹配特征点。
5. **匹配与识别**:对于物体识别,SIFT利用高效的数据结构如快速最近邻搜索和霍夫变换来寻找特征点之间的匹配。通过匹配大量已知物体的特征,算法能够确定单个物体的特征集,并使用最小二乘法优化一致性参数,从而实现对复杂场景中目标的准确识别。
6. **计算效率优化**:为了减少计算量,SIFT采用分阶段检测策略,先进行粗略的全局搜索,然后在通过初始检测筛选出的局部区域进行精细化操作,这有助于提高匹配的效率。
SIFT算法因其在处理图像尺度、旋转、光照和噪声变化时的鲁棒性,以及高度的区分性,被广泛应用于诸如3D重建、物体识别、运动跟踪等多个计算机视觉任务中。它的成功在于结合了尺度不变性和局部描述符的特性,使得在实际应用中表现出强大的适应性和有效性。
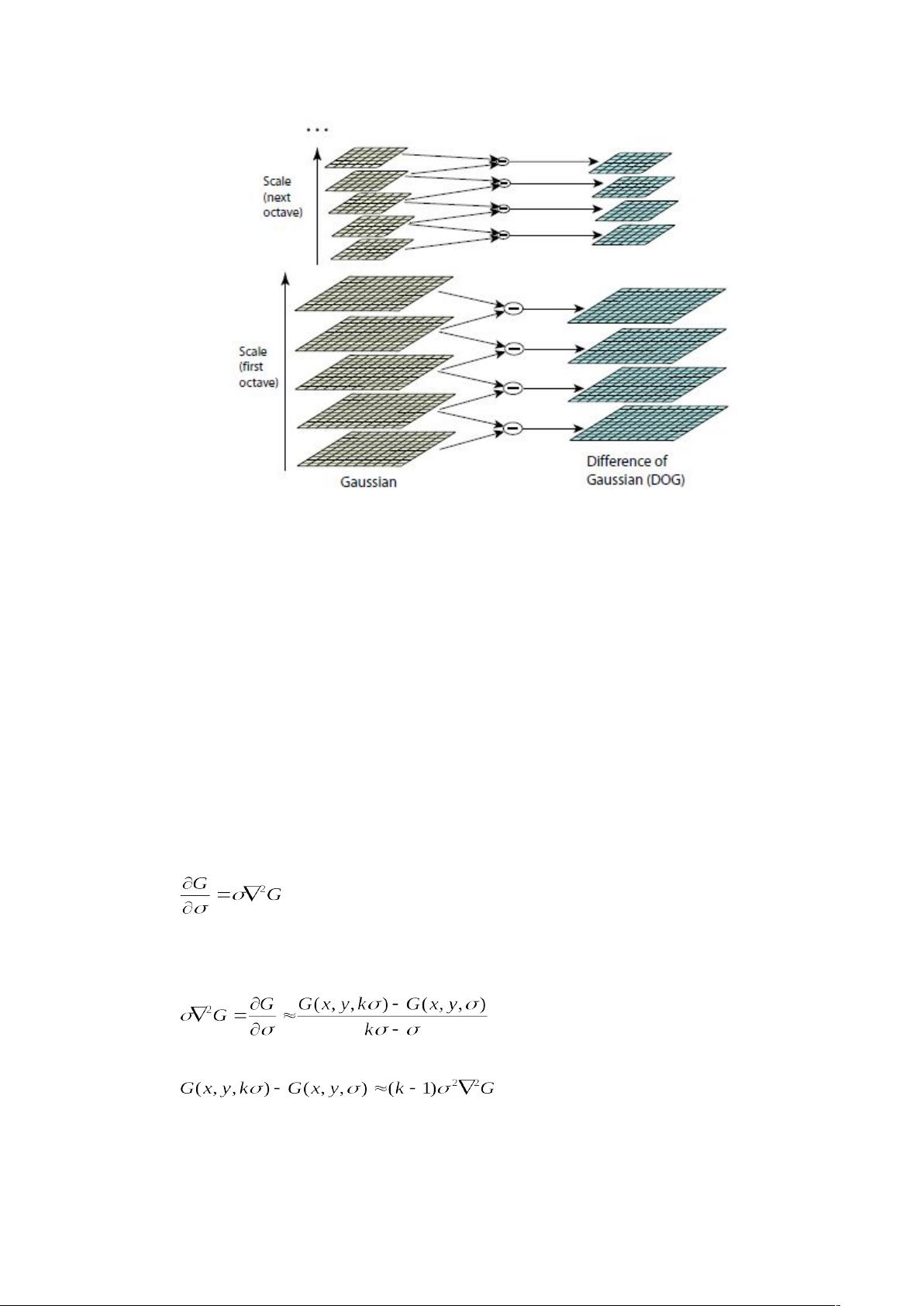
图 1:对于尺度空间的每一层,原始图像都被高斯算子重复卷积来计算出
如图左所示的尺度空间图像。临近的高斯图像被相减得出高斯图像的差分图像,
如图右边所示。在每一层图像被计算得出后,高斯图像则被 2 倍降采样,而后
步骤类似。
需要补充说明的是,高斯差分函数是归一化的高斯拉普拉斯函数的近似,
G
22
,是 Lindeberg (1994)研究得出的。Lindeberg 验证了因子为
2
的拉普拉
斯算子的归一化要求完全的尺度不变性。在更详细的实验比较中, Mikolajczyk
(2002)发现通过
G
22
的最大最小值,相比于很多其它的这类函数,可以得到
最稳定的图像特征,比如梯度、Hessian, 以及 Harris 边沿函数等。
D 和
G
22
的关系可以从热传导等式推知(参数用 σ 代替通常所用的 t=
2
):
。
从这里我们能够看到
G
2
可以通过无限差分计算逼近
/G
,即利用相邻尺度
kσ 和 σ 的差分:
因此,
。
这体现了当高斯差分函数的尺度因一个常量变化而不同时,它本身已经满
足了尺度不变性的拉普拉斯算子的
2
尺度的归一化的要求。等式中的因子(k-1)
剩余20页未读,继续阅读
2018-07-01 上传
2018-06-07 上传
2016-03-28 上传
2010-10-09 上传
2021-08-09 上传
2012-03-06 上传
2019-08-12 上传

licj163
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
