FANUC机器人系统配置与组件功能详解
版权申诉
51 浏览量
更新于2024-07-01
收藏 905KB PDF 举报
"该文档详细介绍了法那科(FANUC)机器人的基本配置和各组件功能,主要包括操作工具软件、机器人本身以及控制器的介绍。内容涵盖了机器人系统的组成、软件的应用、机器人的操作以及控制器对整个系统的控制作用。"
在法那科(FANUC)的机器人系统中,操作工具软件扮演着至关重要的角色。这些软件安装在控制单元上,通过教导盒上的指令和菜单,可以执行包括控制机器人手臂、附加轴、输入输出(I/O)在内的各种任务。此外,它还能控制外围设备如电池控制、软盘驱动器、打印机和图像传感器,以实现对工件的全面操作。
机器人本身是系统的核心,其机械单元与FANUC系列相结合,能够完成如弧焊等精细操作。机器人配备了焊接喷枪或其他工具,可以根据预设的程序来控制和操作工件。在汽车零件装配等应用中,FANUC机器人表现出卓越的性能。
控制器是机器人系统的心脏,为机械单元提供动力并由装在控制单元上的工件操作软件进行控制。该软件不仅可以管理教导盒、操作面板,还可以配置远程控制单元和其他外围设备。远程控制单元允许外部对机器人系统进行控制,并通过输入输出接口与其他通信单元配合,控制如工件卡具、软驱和打印机等设备。
在软件方面,法那科设计了专门针对材料处理的操作工具软件,具备系统设定、程序创建、测试运行、自动操作和状态监控等功能。通过选择不同的可选功能,可以进一步扩展系统的功能和提升管理效率。
在系统设定部分,用户可以利用弧焊操作工具软件界面进行参数调整,以适应弧焊系统的特定需求。这些设置对于确保机器人系统在实际操作中的精确性和安全性至关重要。
总结来说,这份资料提供了深入理解法那科机器人系统的基础,包括其软件、硬件配置以及如何协同工作以实现高效自动化操作。对于需要使用或维护此类机器人的工程师和技术人员来说,这份文档是一份宝贵的参考资料。
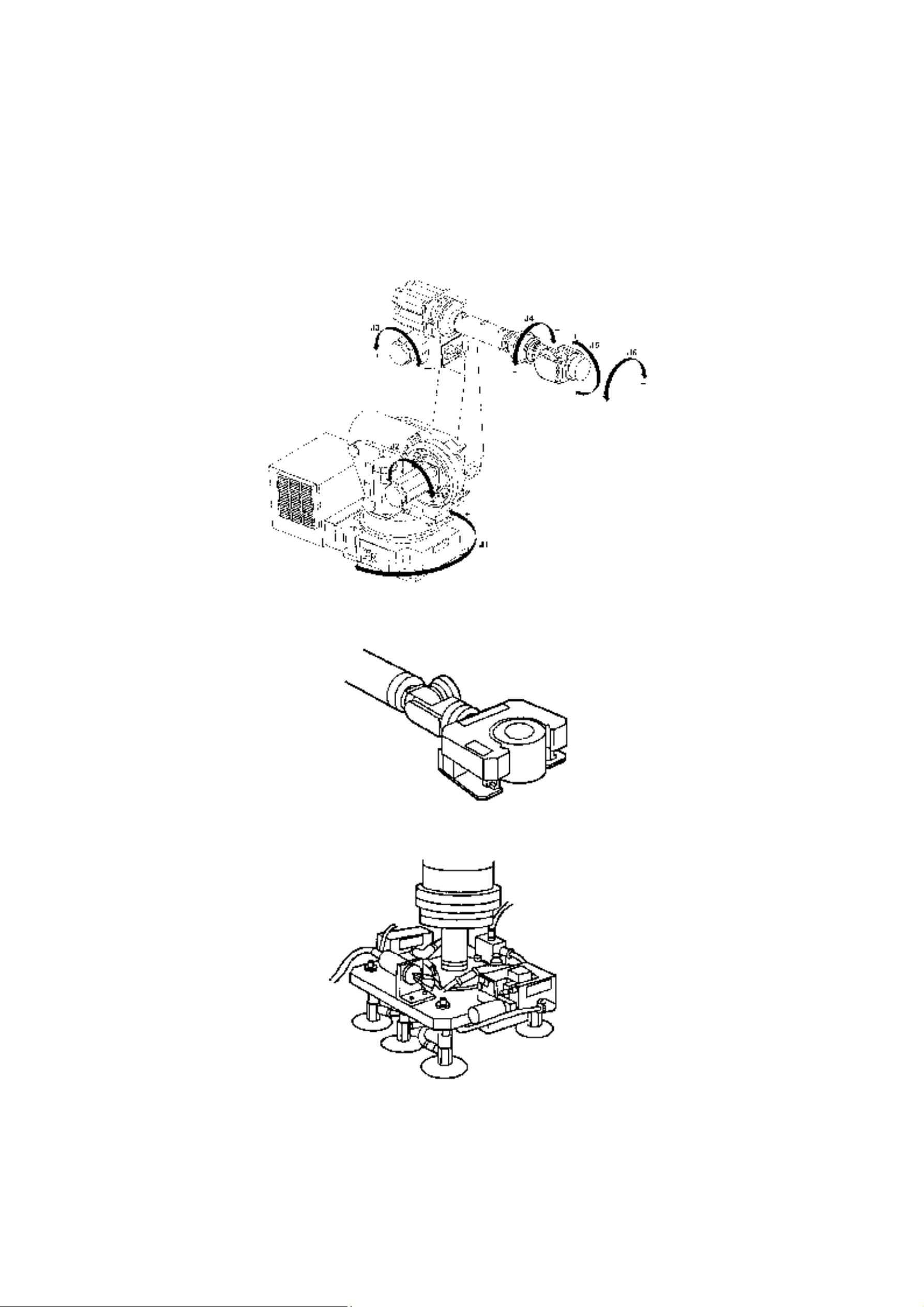
2.2 机器人
机器人是由伺服电机驱动的轴和机械手臂的机械单元。连接机械手臂的地方是一个机械
关节或者一个轴。
J1, J2, 和 J3 是主轴。机器人的基本设置依据的是,每个主轴是作为线性轴还是旋转轴。
腕轴的作用是移动在腕边缘上的受动端(工具)。腕本身可以围绕另外一个腕轴旋转,
同时受动端可以绕另外一个腕轴旋转。
图 2--3. 主轴和腕轴
图 2--4. 有夹头的机械手
图 2--5. 有吸盘无夹头的机械手
在一个弧焊系统中,弧焊枪装在机器人的机械腕上。
20
剩余23页未读,继续阅读
393 浏览量
1622 浏览量
2022-11-06 上传
2021-09-13 上传
2021-10-14 上传

apple_51426592
- 粉丝: 9851
- 资源: 9652
 我的内容管理
展开
我的内容管理
展开







最新资源
- AN1299_Source_Code_dsPIC33CK256MP508_MCLV_MCHV_PLL_ESTIMATOR.zip
- 算法问题:存储我解决的部分算法问题
- Examcookie-crx插件
- 篮球赛工作总结下载
- movie-frontend
- l love youc#版.zip
- 下周:App ECOLETA,下周火箭比赛
- 公益小站-crx插件
- java版sm4源码-alg-sm2-demo:SM2密码算法JAVA调用演示程序
- java se写的坦克游戏.zip
- 小学2013年工作总结
- upptime:Ne Neal Daringer的正常运行时间监视和状态页面,由@upptime提供支持
- local-stack-demo-service
- spring图书管理系统.zip
- ProCyclingStats:从ProCyclingStats网站下载车手统计信息
- Kaggle_Otto_Product_Classification:Kaggle Otto Group 产品分类
