水下声学传感器网络RSS定位技术研究
需积分: 10 157 浏览量
更新于2024-08-12
收藏 909KB PDF 举报
"这篇研究论文探讨了在水下声学传感器网络中,基于接收信号强度指示(RSS)的传感器定位技术。由于全球定位系统(GPS)在水下无法使用,因此利用无线传感器网络(WSNs)进行源定位在海洋学应用中变得越来越受欢迎。与陆地无线传感器网络(TWSNs)不同,水下无线传感器网络(UWSNs)需要使用水下声学(UWA)信号。由于实际操作的简便性和低成本传感器设备的限制,该论文考虑了RSS为基础的源定位方法,但这一领域因水下声学传输损耗(TL)的复杂性而尚未得到充分关注。"
在这篇2016年IEEE国际音频、语音和信号处理会议(ICASSP)上发表的论文中,作者Tao Xu、Yongchang Hu、Bingbing Zhang和Geert Leus深入研究了如何在水下声学传感器网络中实现有效的定位策略。水下环境对传统定位技术构成了挑战,因为GPS信号无法穿透水面,因此需要依赖其他手段。
RSS是一种常用的方法,通过测量传感器接收到的信号强度来估计目标的位置。然而,在水下环境中,声波传播的特点使得RSS定位变得复杂。水中的温度、盐度、压力变化以及多路径效应都会显著影响声波的传播损耗,导致定位精度下降。论文中,作者可能讨论了这些因素对RSS定位性能的影响,并提出了解决方案或改进方法。
论文可能涵盖了以下几个关键知识点:
1. **水下声学传播特性**:详述了水下声波传播的物理原理,包括传播速度、衰减和多路径传播等。
2. **RSS模型建立**:讨论了建立适用于水下环境的RSS传播模型,包括考虑各种环境参数的模型修正。
3. **定位算法**:介绍了基于RSS的定位算法,如三边测量法、最大似然估计或卡尔曼滤波等,并分析了它们在水下环境中的表现和局限性。
4. **误差分析**:分析了由水下声学传输损耗引起的定位误差,并可能提出了误差校正策略。
5. **实验与仿真**:提供了实验数据或仿真结果,以验证所提方法的有效性,并评估了定位精度。
6. **实际应用**:探讨了这种方法在海洋监测、水下机器人导航、海底资源探测等领域的潜在应用。
这篇论文旨在克服水下环境的特殊挑战,通过RSS实现精确的传感器定位,这对于推动水下通信和监测技术的发展具有重要意义。通过深入理解这些内容,读者可以更好地理解和解决水下声学传感器网络中的定位问题。
2016 IEEE International Conference on Acoustic, Speech and Signal Processing(ICASSP)
RSS-BASED SENSOR LOCALIZATION IN UNDERWATER ACOUSTIC SENSOR NETWORKS
Tao Xu
1,2
, Yongchang Hu
3
, Bingbing Zhang
4
and Geert Leus
3
1
Tianjin 712 Communication & Broadcasting Co. Ltd, Tianjin, 300462, China
2
Institute of Microelectronics, Tsinghua University, 100084, Beijing, China
3
Fac. EEMCS, Delft University of Technology, Mekelweg 4, 2628CD, Delft, Netherlands
4
Fac. EE, National University of Defence Technology, 410073, Changsha, China
ABSTRACT
Since the global positioning system (GPS) is not applicable under-
water, source localization using wireless sensor networks (WSNs) is
gaining popularity in oceanographic applications. Unlike terrestrial
WSNs (TWSNs) which uses electromagnetic signaling, underwater
WSNs (UWSNs) require underwater acoustic (UWA) signaling.
Received signal strength (RSS)-based source localization is consid-
ered in this paper due to its practical simplicity and the constraint
of low-cost sensor devices, but this area received little attention
so far because of the complicated UWA transmission loss (TL)
phenomena. In this paper, we address this issue and propose two
novel semidefinite programming (SDP) approaches which can be
solved more efficiently. The numerical results validate our proposed
SDP solvers in underwater environments, and indicate that the
placement of the anchor nodes influences the RSS-based localization
accuracy similarly as in the terrestrial counterpart. We also highlight
that adopting traditional terrestrial RSS-based localization methods
will fail in underwater scenarios.
Index Terms— Underwater, Localization, RSS-based, SDP.
1. INTRODUCTION
Underwater acoustic (UWA) communication systems differ from
terrestrial telemetry due to differences in system geometry and
environmental conditions [1]. Underwater wireless sensor networks
(UWSNs) are envisioned for oceanographic applications such as
pollution monitoring, offshore exploration, disaster prevention, as-
sisted navigation, and tactical surveillance applications, while source
localization is another important task. Apart from localization
protocol designs [2], researchers paid a lot of attention to four
different underwater distance measurement techniques [3] as applied
in TWSNs, including time difference of arrival (TDoA), time of
arrival (ToA), received signal strength (RSS), and angle of arrival
(AoA). ToA is widely employed in underwater source localization
works for measuring the distance, e.g., [4], although it demands
a precise synchronization among nodes which is challenging in
UWSNs. TDoA either uses two different transmission media (like
radio and acoustic waves) or adopts reference beacons to estimate
This work is supported in part by National Natural Science Foun-
dation of China (#61302140), China Postdoctoral Science Foundation
(#2015M570230) and Tianjin Enterprise-Postdoctoral Fund for Selected In-
novation Program, performed under University-Enterprise joint postdoctoral
station between Tsinghua University and Tianjin Zhonghuan Electronic &
Information (Group) Co., Ltd. and also in part at National University
of Defence Technology. We thank Mr. MA Yan from Tianjin 712
Communication & Broadcasting Co. Ltd, Prof. LIU Zewen from Tsinghua
University and Prof. WEI Jibo from National University of Defence
Technology for valuable discussions.
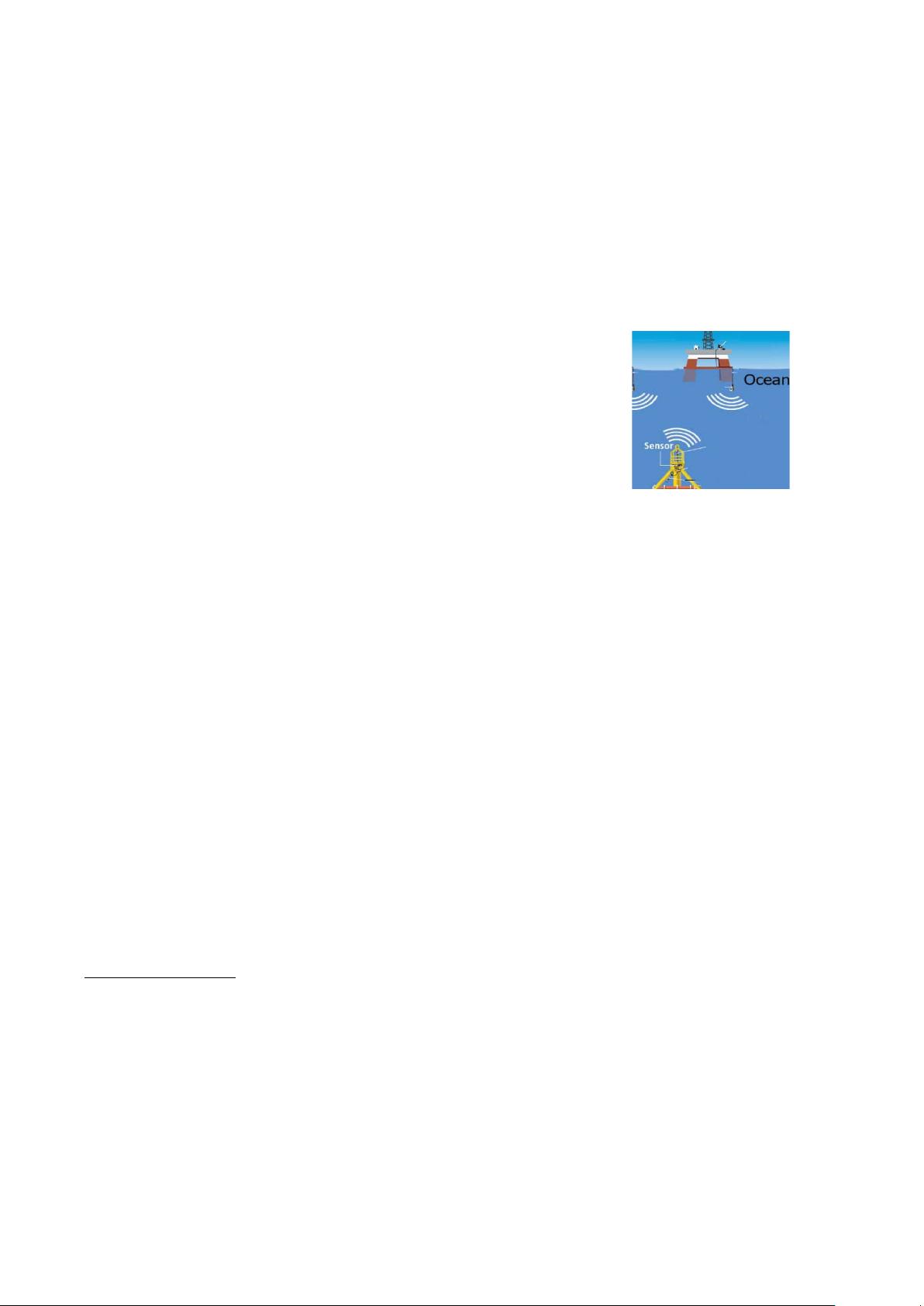
Fig. 1. Demonstration of UWA localization
the distance. However, the former is infeasible since RF is not
applicable in aquatic environments [5], while the latter can lead
to problems due to the unpredictable UWA velocities [6]. AoA
relies on a direct line-of-sight (LOS) UWA transmission path which
may not exist at all unlike in terrestrial radio [7], while typical
multi-path components in UWA channels can also lead to large
errors in AoA measurements [8]. RSS-based underwater source
localization gets less attention as another alternative to measure
distance, since it is difficult to achieve accurate ranging due to
multipath propagations and the complicated UWA transmission loss
(TL) phenomena [3]. However, it can be argued that for certain
water depths, the UWA channels show nice transmission features
that fit well to a TL model and thus RSS-based localization can be
considered for such cases [9]. To represent the TL features of an
UWA channel, the Urick propagation model [10] is among the most
popular, based on which some statistical models are derived [11].
Other UWA TL modeling methods can also be found, e.g., using
Lambert W function [12]. In this paper, we consider RSS-based
UWA localization using UWSNs, where the target is a source node
that transmits acoustic signals to all the anchor nodes (beacons)
which usually lie on the water surface and are able to obtain their
precise locations via GPS as depicted in Fig. 1. Literature studying
RSS-based localization underwater using acoustic waves is rather
rare, yet it includes [9] choosing the Lambert W function to model
the UWA TL and performing a simple triangulation method based
on known distances, [13] combining TOA and RSS measurements
where the RSS-based measurements are simply assumed known
and [14] adopting a terrestrial acoustic wave propagation model to
study RSS-based underwater localization. In this sense, we may for
the first time introduce SDP solvers for UWA RSS-based localization
in UWSNs based on a UWA propagation model.
Notation: Upper (lower) bold-face letters stand for matrices
(vectors); superscript T denotes transpose, [A]
k,m
stands for the
(k, m)th entry of the matrix A, Trace[A] for the trace of the matrix
A, Rank[A] for the rank of the matrix A; R
M
represents the M -
dimensional field of real numbers.
1
下载后可阅读完整内容,剩余4页未读,立即下载
2021-08-10 上传
2021-09-25 上传
2013-04-15 上传
2023-10-15 上传
2023-05-19 上传
2023-10-22 上传
2023-07-09 上传
2023-05-20 上传
2023-08-01 上传

weixin_38640984
- 粉丝: 4
- 资源: 944
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
