机器人课程虚拟机安装与配置教程(Arduino/ROS/SLAM)
159 浏览量
更新于2024-07-15
收藏 2.68MB PDF 举报
本文是一篇详细的指南,旨在帮助学生和专业人士在进行机器人实践课程时,利用VirtualBox虚拟机进行Arduino、ROS(机器人操作系统)、SLAM(同时定位与建图)等技术的学习和开发。文章首先介绍了如何在Windows系统上安装VirtualBox-6.1.4虚拟机,包括安装步骤、路径配置和内存分配,强调了至少4GB内存(推荐8GB以上)以确保虚拟机的流畅运行。
在虚拟机配置阶段,创建了一个固定大小的虚拟硬盘,根据需求自定义其大小。接着,作者指导用户加载名为"Robot_20201.iso"的镜像文件,无论是IDE方案还是SATA方案,都需要正确设置镜像顺序以避免启动问题。在IDE方案中,用户能够顺利进入桌面并测试Gazebo环境,而在SATA方案下,尽管遇到了一些挑战,但最终还是通过IDE模式成功启动。
文章接下来重点介绍了如何利用虚拟机进行硬件编程,如通过USB连接Arduino Uno R3进行编程,并验证其工作正常。此外,还展示了如何在虚拟环境中运行ROS(版本1和2),以及ROS2中的turtlesim示例。对于SLAM,提供了Iloveubuntu平台下的畸变校正和三维空间刚体运动案例,所有测试案例都能正常运行。
这篇教程提供了一个全面的框架,让学习者能够在不同的机器人技术平台上进行实践,无论是在不同系统间的迁移,还是优化硬件资源,都为读者提供了宝贵的实践指导。作者Zhangrelay祝愿读者在使用过程中收获满满。
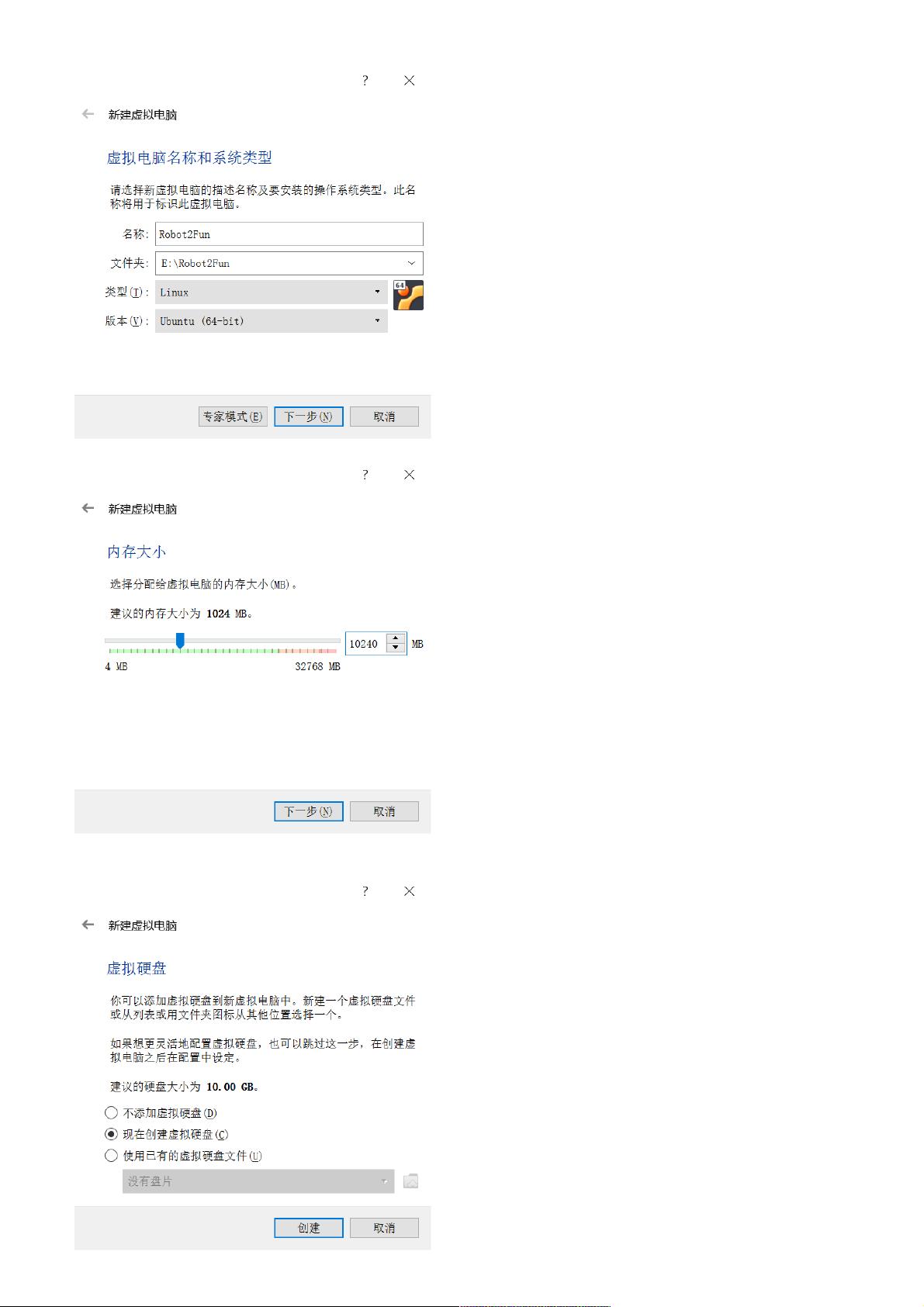
点击新建工具:
名称路径配置
分配内存(10GB)
为保证流畅运行虚拟机,内存请不要吝啬,至少要大于4GB,推荐8GB以上。
创建虚拟硬盘
剩余14页未读,继续阅读
1794 浏览量
139 浏览量
382 浏览量
159 浏览量
2021-04-08 上传
点击了解资源详情
281 浏览量
416 浏览量

weixin_38723236
- 粉丝: 7
- 资源: 924
 我的内容管理
展开
我的内容管理
展开







最新资源
- 创新商业公司网页模板
- leetcode-[removed]前攻城狮从零入门算法的宝藏题库,根据算法大师的经验总结了100+道LeetCode力扣的经典题型JavaScript题解和思路。一起加油
- 情侣微信小程序,支持任务完成、奖励兑换、记事本和 Todo-List 等功能.zip
- terminal-context-menu
- QT5.13.1的MySQL所需文件.rar
- 中秋节动态宽银幕中国风ppt片头动画模板.rar
- 绿色电子科技商务网页模板
- nodeul-market-retro
- firmware-master.zip
- 投资组合:个人投资组合
- 中国电信分公司微博运营策划方案ppt模板.rar
- 绿色城市生活公司网页模板
- simpy_practice:引用官方文档中的示例:https:simpy.readthedocs.ioenlatestindex.html
- 商务团队背景图片PPT模板
- PSEC:对等安全临时通信协议
- java源码查看-pimcore-groupdocs-viewer-java-source:适用于PimCore的GroupDocsViewe
