"基于OpenCV的工程图数据提取与UWB定位系统应用研究_V21"
需积分: 0 39 浏览量
更新于2024-04-02
收藏 3MB DOCX 举报
陈俊杰毕业论文的研究主题是基于OpenCV的工程图数据提取及其在UWB定位系统中的应用。该论文主要从铺砖机器人在实际施工场地中室内定位的需求出发,提出了提取工程图数据和实时定位两个部分的解决方案。在第一部分中,工程图由常规的DWG格式文件转换到JPG格式图像,经过OpenCV处理,检测出工程图中的角点,并利用数据结构中图论的知识提出了角点定位排序法。第二部分利用排好序的角点,通过Qt绘制出等比例的工程图,利用砖块对工程图进行栅格化,将砖块信息反馈给铺砖机器人,最后通过UWB串口返回的数据,通过Python和C/C++的混合编程定位机器人在室内的实时位置。整个研究涵盖了图像处理、数据结构、机器人技术、定位系统和混合编程等多个领域。
随着工程施工的不断发展,铺砖机器人在施工场地中的应用越来越广泛。然而,实际施工场地的环境复杂多变,铺砖机器人需要实时准确的定位才能有效地完成任务。因此,提取工程图数据和实时定位成为了关键问题。通过对OpenCV的运用,能够有效地处理工程图数据,提取角点信息,并通过图论知识进行排序,为机器人的定位提供了基础。而结合UWB定位系统,能够实现机器人在室内的高精度定位,提高了工作效率和准确性。
在实际应用中,该研究成果可以为铺砖机器人在各种复杂场景下的定位提供技术支持,提高机器人在施工领域的应用价值。同时,基于OpenCV和UWB定位系统的混合编程方法,为其他机器人领域的研究提供了新思路和方法。通过本文的研究,我们不仅可以更好地理解工程图数据的处理和机器人定位的原理,还可以将这一技术应用到更广泛的领域中,推动机器人技术的进步和发展。
综上所述,陈俊杰的毕业论文基于OpenCV的工程图数据提取及其在UWB定位系统中的应用,通过对工程图数据处理和机器人定位技术的研究,为铺砖机器人在实际施工场地中的定位问题提供了有效的解决方案。该研究成果对机器人技术和定位系统领域具有一定的学术和实际意义,将为相关领域的研究和应用带来新的启发和发展机遇。
陈俊杰:基于 OpenCV 的工程图数据提取及其在 UWB 定位系统中的应用
5
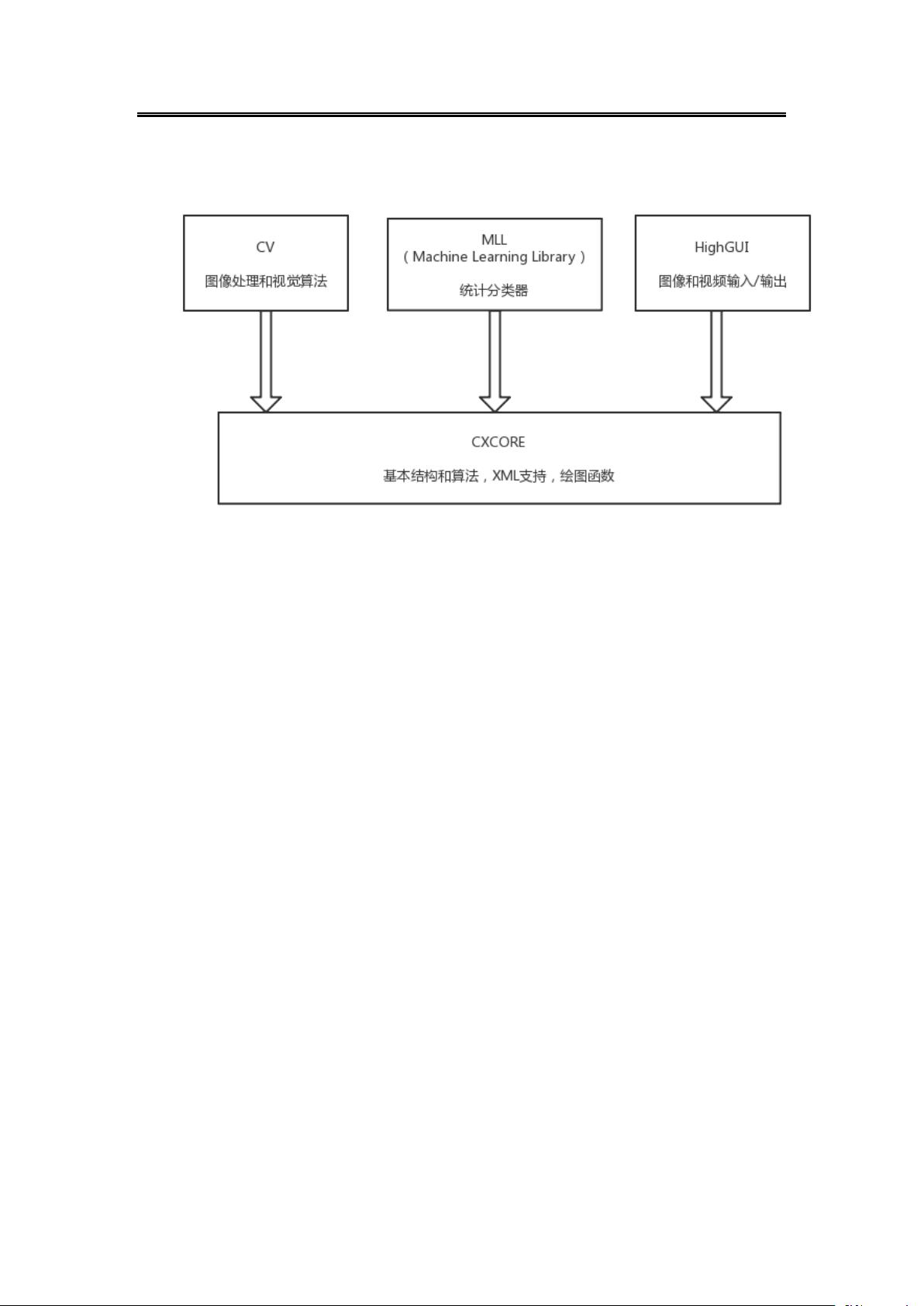
CvAux 模块,该模块中一般存放一些新出现的实验性的算法和函数,同时还有
一些即将被淘汰的算法和函数
[1]
。
图 2-1 OpenCV 主要的四个模块及其关系图
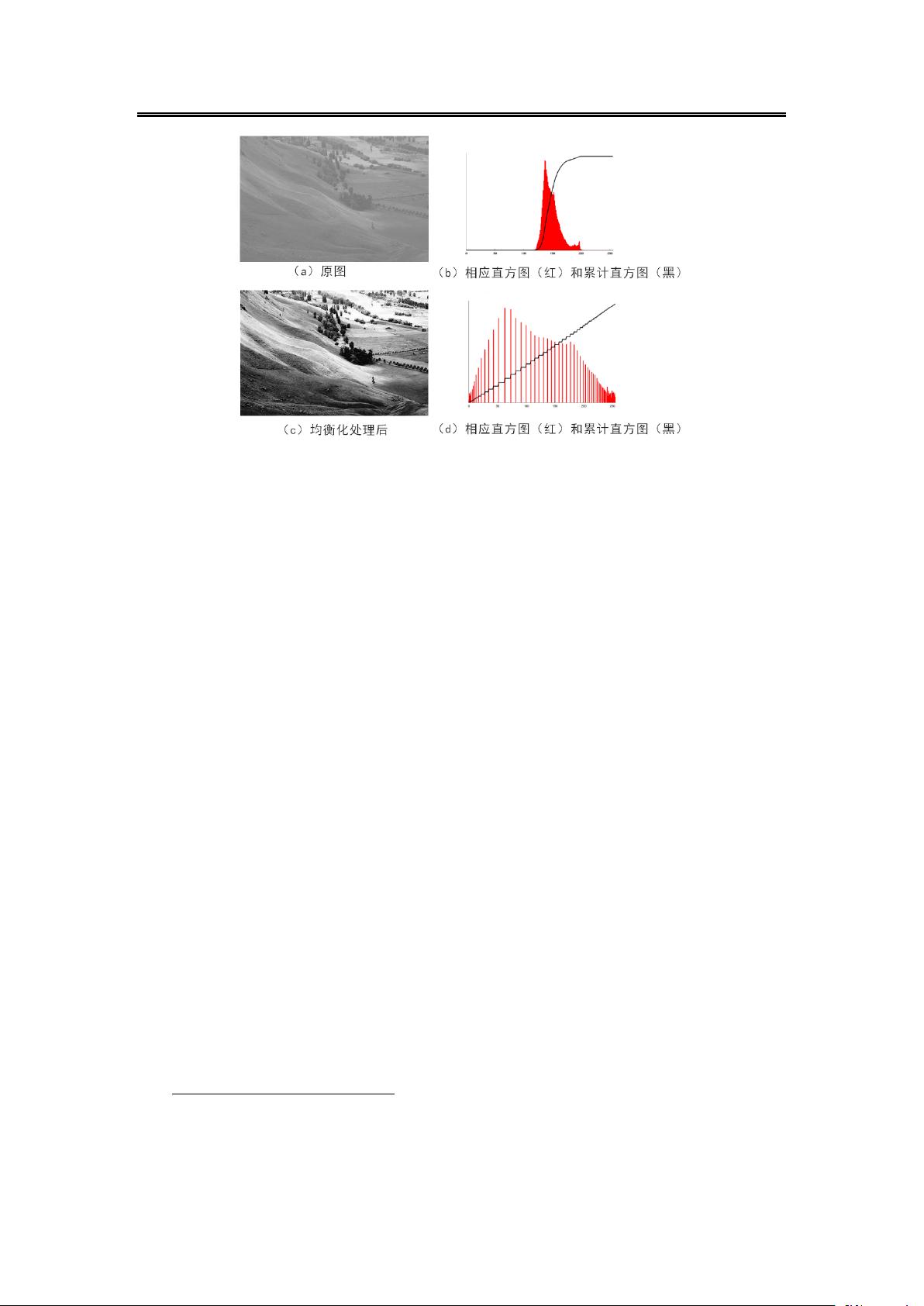
2.2.2 灰度处理
一、灰度的概念:
一个大小为 M * N 的数字图像是由 M 行 N 列的有限元素组成的,每个元素
(又称为像素)都有特定的位置和幅值,代表了所在行列位置上的图像物理信息,
如灰度和 RBG 等。
在二指图像(像素只有 0 和 1 两种取值,0 代表黑色,1 代表白色)中进一
步加入许多介于黑色和白色之间的颜色深度,就构成了灰度图像。这类图像通常
显示为从最暗黑色到最亮的白色的灰度,每种灰度(颜色深度)称为一个灰度级,
通常用 L 表示。在灰度图像中,像素可以取 0~L-1 之间的整数值,根据保存灰
度数值所使用的数据类型不同,可能有 256 种取值或者 2^k 种取值,当 k=1 时即
退化为二指图像。在通常情况下,图像的灰度级范围从 0 到 255,白色为 255,
黑色为 0,故黑白图片又称为灰度图像。灰度级越大表示越亮。
二、图像灰度级分辨率:
在数字图像处理中,灰度级分辨率又称色阶,是指图像中可分辨的灰度级数
目 L,它与存储灰度级别所使用的数据类型有关。由于灰度级度量的是投射到传
感器上光辐射值的强度,所以灰度级分辨率也叫辐射计量分辨率
[2]
。
剩余59页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-08-08 上传
2022-08-08 上传
2022-08-08 上传
2022-08-03 上传
2021-10-04 上传

两斤香菜
- 粉丝: 22
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
