FANUC机器人主板结构与电缆连接解析
版权申诉
"本文档详细介绍了FANUC机器人的主板结构和电缆连接示意图,涵盖了主板的主要功能、部件构成、内部存储类型以及主板的各种接口。"
在FANUC机器人的核心部分,主板扮演着至关重要的角色。主板是机器人控制系统的心脏,负责处理各种关键任务,包括:
1. **路径数据处理**:主板接收并处理来自编程的机器人运动路径数据,确保机器人的精确运动和轨迹执行。
2. **安全回路监控**:主板持续监控安全回路,确保在任何情况下都能迅速响应紧急停止和其他安全相关的信号,保证操作安全。
3. **伺服放大器控制**:通过PWM信号,主板与伺服放大器交互,控制电机的扭矩和速度,实现机器人的精确运动。
4. **设备通讯**:主板通过I/O接口与其他设备进行通信,如传感器、PLC、HMI等,实现系统的集成和数据交换。
5. **视觉系统信号处理**:当机器人配备视觉系统时,主板会处理视觉系统提供的信息,进一步优化运动控制和定位精度。
主板由以下主要部件组成:
- **CPU卡**:作为计算中心,执行所有的指令和算法。
- **DRAM**:动态随机存取内存,提供快速的数据存取,但断电后数据会丢失。
- **启动监控器**:确保系统的正确启动和运行。
- **FROM/SRAM模块**:用于存储系统软件和临时数据。
- **轴控制卡**:针对不同数量的轴(6-36轴)提供定制化的控制。
- **电池**:为SRAM提供备份电源,防止断电时数据丢失。
- **指示灯**:显示主板的状态信息。
- **以太网二极管**:指示网络连接状态。
主板的存储结构包括:
- **闪存**:主要用于存储控制柜的系统软件,不可直接写入,但可以从外部擦除和重装。
- **SRAM**:需要电池备份,存储用户数据和程序。
- **D-RAM**:无电池备份,启动时从闪存加载数据,用于日常运行。
- **BOOTROM**:包含启动程序、诊断程序和特殊程序,类似于PC的BIOS。
主板上的接口包括:
- **CP8B**:电池接口。
- **JRL8**:高速数字输入接口。
- **JRS16**:RS232C/USB接口,用于串行通信和设备连接。
- **JD17**:多通道RS232C/RS485接口,支持多种通信协议。
- **JD1A**:FANUC输入/输出通讯接口。
- **JRS19**:与急停电路板的通讯接口。
- **JRL7**:录像接口,可能用于记录机器人动作或调试数据。
- **CRS35**:力传感器接口,用于力控应用。
这些接口使得主板能够连接各种外部设备,扩展机器人的功能和应用范围。理解主板的结构和接口对于FANUC机器人的维护、升级和故障排查至关重要。
FANUC 机器人的主板结构和电缆连接示意图介绍
1. 主板的功能
处理机器人运动的路径数据
监控安全回路
为伺服放大器提供 PWM(脉冲宽度调制)信号
通过 I/O 与控制柜以外的设备通讯
处理视觉系统信号为伺服放大器提供 PWM(脉冲宽度调制)信号
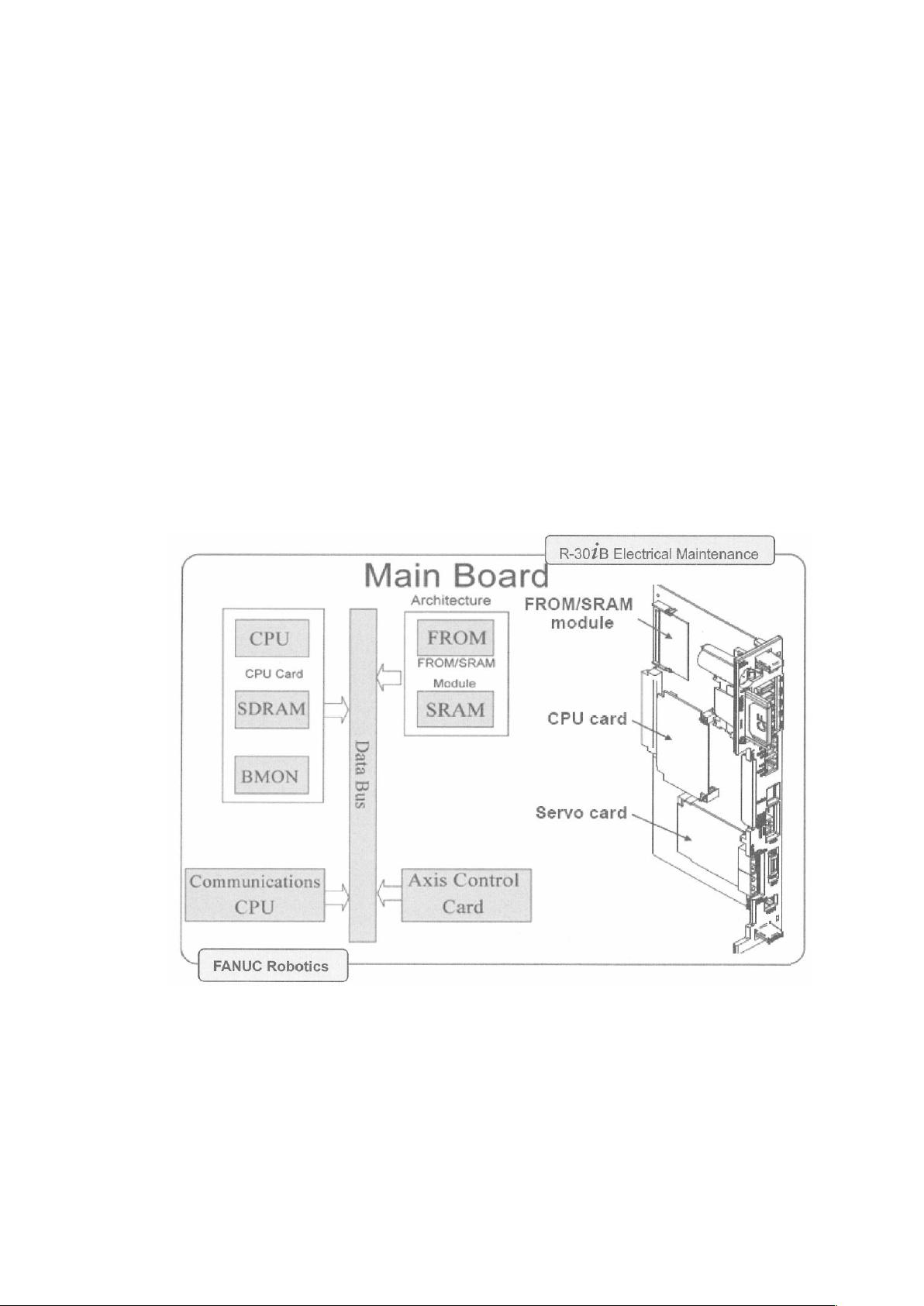
2. 主板部件
CPU 卡
DRAM
启动监控器
FROM/SRAM 模块
轴控制卡(6-36 轴的卡)
电池(3V 锂电池),用于备份 SRAM
指示灯(7 段二极管显示;状态二极管)
以太网二极管
3. 主板的结构
闪存:
不需要电池
存储控制柜系统的大部分软件
类似于家用个人电脑的 CD-ROM 驱动,可以从闪存读取数据,但是正常情况下不能向
闪存写入数据。
山村的内容可以从控制柜外部擦除和重新装载。
下载后可阅读完整内容,剩余8页未读,立即下载
2022-07-10 上传
2023-04-19 上传
2022-07-10 上传
2022-03-31 上传
2022-03-29 上传
2022-07-01 上传

AAA_自动化工程师
- 粉丝: 6971
- 资源: 3433
 我的内容管理
展开
我的内容管理
展开







最新资源
- BottleJS快速入门:演示JavaScript依赖注入优势
- vConsole插件使用教程:输出与复制日志文件
- Node.js v12.7.0版本发布 - 适合高性能Web服务器与网络应用
- Android中实现图片的双指和双击缩放功能
- Anum Pinki英语至乌尔都语开源词典:23000词汇会话
- 三菱电机SLIMDIP智能功率模块在变频洗衣机的应用分析
- 用JavaScript实现的剪刀石头布游戏指南
- Node.js v12.22.1版发布 - 跨平台JavaScript环境新选择
- Infix修复发布:探索新的中缀处理方式
- 罕见疾病酶替代疗法药物非临床研究指导原则报告
- Node.js v10.20.0 版本发布,性能卓越的服务器端JavaScript
- hap-java-client:Java实现的HAP客户端库解析
- Shreyas Satish的GitHub博客自动化静态站点技术解析
- vtomole个人博客网站建设与维护经验分享
- MEAN.JS全栈解决方案:打造MongoDB、Express、AngularJS和Node.js应用
- 东南大学网络空间安全学院复试代码解析
