基于PLC的步进电机精准定位与控制设计
需积分: 12 76 浏览量
更新于2024-08-01
收藏 386KB DOC 举报
本次研究主要聚焦于"步进电机定位控制系统"的设计与实现,该系统是基于西门子S7-200 PLC的工程项目,针对成都理工大学自动化过程控制课程设计的要求。由一组同学共同完成,包括组长张琨及组员郭先林、段林等人,在指导老师彭焕荣、康东和蒋开明的指导下进行。
设计目标是构建一个能够精确控制步进电机的系统,使其能够稳定启动,通过高速运动接近指定位置,然后在接近时减速并进行低速运动,确保准确停靠在预设位置。这种控制策略还包括了在到达目的地后,电机会自动按照预先设定的程序返回起始点,整个过程考虑了电机的加速、高速、减速和低速阶段,并且能实现每秒级的高精度定位。
步进电机作为开环控制元件,其工作原理依赖于电脉冲信号与其机械响应之间的直接关系。在理想条件下,电机的速度和位置完全取决于输入脉冲的频率和数量,不受负载变化的影响,具有很高的定位精度。然而,尽管步进电机因其特性被广泛应用,实际操作中需要注意的是,它们不能像直流电机或交流电机那样常规使用,需要特定的控制算法和硬件配合,以克服可能的周期性误差和处理负载变化带来的挑战。
设计过程中,PLC的选择是为了简化控制流程,减少接线复杂性,并确保系统的可靠性和一致性。S7-200 PLC以其用户友好界面和强大的编程功能,成为理想的控制器平台。通过编写相应的控制程序,可以灵活调整电机运动参数,如速度、方向和停止点,从而实现所需的定位精度。
在整个设计工作中,团队成员不仅需要扎实的理论基础,还要具备实践操作能力,将PLC编程、电机控制理论和实际电路连接结合起来,确保系统在各种工作条件下都能稳定运行。此外,毕业设计不仅仅是一次技术实践,也是培养团队协作和工程思维的重要环节。
总结来说,步进电机定位控制系统设计是自动化领域的核心实践,展示了PLC在现代工业控制中的实用价值,同时也强调了对电机工作特性和控制策略的理解。这是一项既有理论深度又有实践操作意义的研究项目,对于提升学生在工业控制领域的技能具有重要意义。
SIMATIC S7-200 系列 PLC 适用于各行各业,各种场合中的检测、监
测及控制的自动化。S7-200 系列的强大功能使其无论在独立运行中,或相
连成网络皆能实现复杂控制功能。因此 S7-200 系列具有极高的性能/价格比。
S7-200 系列出色表现在以下几个方面:
极高的可靠性;极丰富的指令;易于掌握;便捷的操作 ;丰富的内置集
成功能;实时特性;强劲的通讯能力;丰富的扩展模块。
S7-200 系列在集散自动化系统中充分发挥其强大功能。使用范围可覆
盖从替代继电器的简单控制到更复杂的自动化控制。应用领域极为广泛,覆
盖所有与自动检测,自动化控制有关的工业及民用领域,包括各种机床、机
械、电力设施、民用设施、环境保护设备等等。如:冲压机床,磨床,印刷
机械,橡胶化工机械,中央空调,电梯控制,运动系统。
随着 PLC 的不断发展,其功能越来越强大,除了有简单的逻辑功能和顺序
控制外,运算功能的加入,PID 和各类高速指令,使得 PLC 对复杂和特殊系统
的控制应用更加广泛。PLC 与数控技术的结合产生了各种不同类型的数控设备,
如复杂的数控加工中心,简单的激光淬火用 X_Y 数控平台,X_Y 绘图仪和两轴
运动的 X_Y 数控装置。它一般是由两个步进电机驱动,可以由 X 轴方向和 Y 轴
方向运动,根据 PLC 别写不同的程序可以形成不同的运动轨迹,以完成生产的
控制要求。
1.设计内容
1.1 方案分析比较:
方案一:采用 PLC 对电机控制
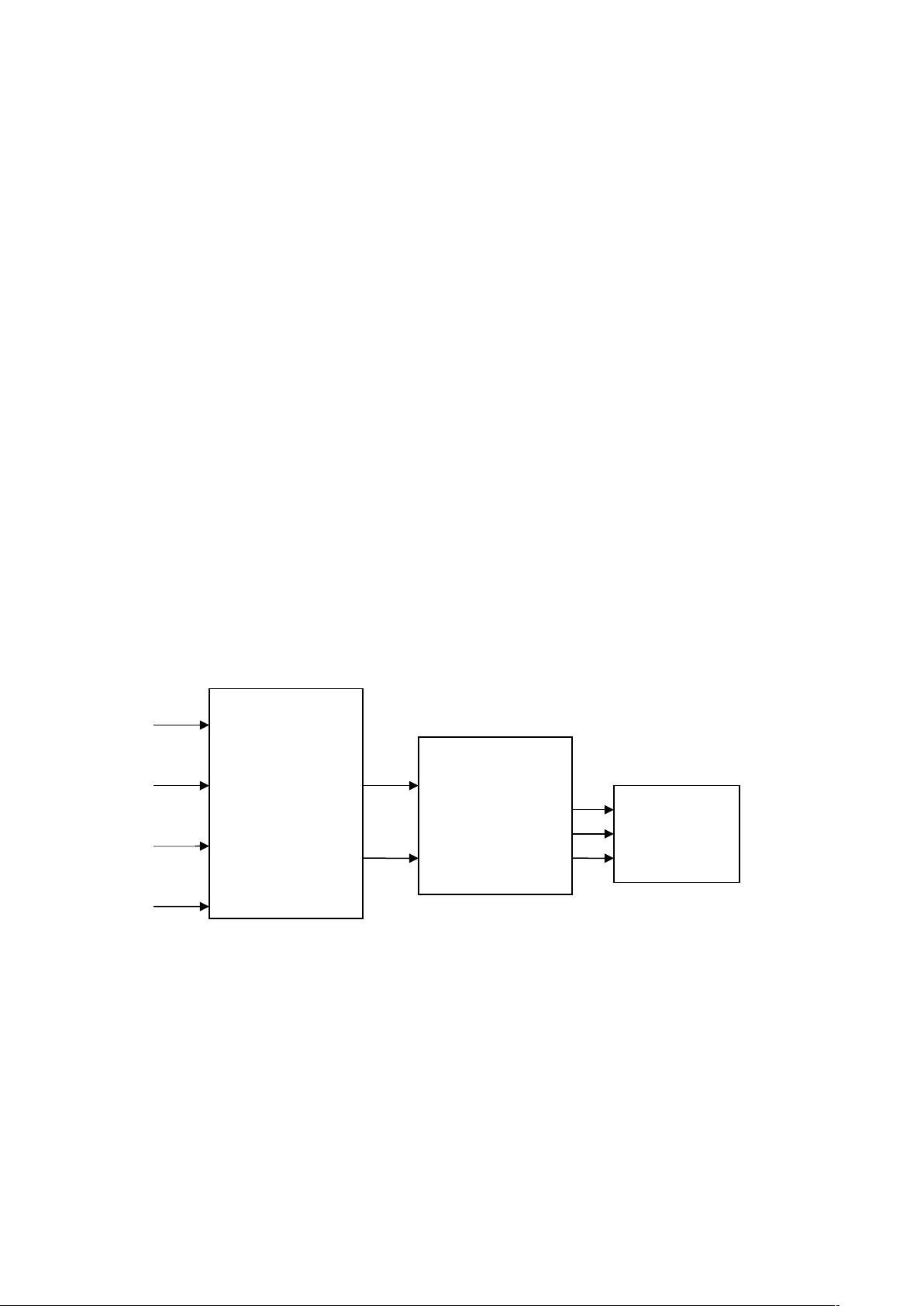
其设计出该系统的硬件连线图,如下:
原理简述:首先控制步进电机使之稳步启动,然后高速运动,接近指定位
置时,减速之后低速运动一段时间,再准确地停在预定的位置上,最后步进电
机停留 2S 后,按照前进时的加速—高速—减速—低速的步骤返回到起始点。
其优点是过程简单,接线方便,而且精确度高;
I0.0
I0.1 Q0.0
S7--200
CPU221
I0.2 Q0.2
I0.3
SB0
SB1
SQ1
SQ2
Pulse
步进电机 U
驱动器 V
DIR W
U 三相
V 步电机
W
剩余14页未读,继续阅读
2012-06-17 上传
2020-08-14 上传
2021-10-05 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-07-13 上传
2021-10-16 上传

yangdong19860915
- 粉丝: 0
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
