基于MSP430的智能巡线小车设计与实现
需积分: 10 162 浏览量
更新于2024-07-21
收藏 9.61MB DOC 举报
"第三届电子设计与测试竞赛方案,主要涉及智能巡线小车的设计,采用msp430芯片作为核心控制器,通过红外光电传感器进行路面检测,实现小车的自动寻迹功能。"
在电子设计领域,尤其是针对电子设计大赛,参赛者们经常会被要求设计并实现具有创新性和实用性的项目。本设计方案聚焦于一款智能巡线小车,它采用了Texas Instruments的MSP430系列微控制器——MSP-EXP430F5529LP,这是一款低功耗、高性能的16位单片机,适合用于需要精确控制和高效运算的嵌入式应用。
小车的核心任务是沿着黑线自动行驶,这一功能的实现离不开红外光电传感器。传感器可以检测到黑线与周围环境的色彩差异,从而提供路面信息给单片机。通过分析这些信号,单片机能够判断小车的位置并适时调整驱动电机,使小车保持在黑线上行驶。这种路面检测技术对于无人车辆导航至关重要,也是自动化领域的基础技术之一。
在硬件设计上,小车的动力来源和电机驱动模块同样关键。电源方案需要考虑小车运行时的能耗以及电池续航能力,确保小车能在比赛规定的时间内持续工作。电机驱动模块则负责将单片机的控制信号转换为电机所需的电压和电流,以精确控制小车的速度和方向。
软件部分,通常会涉及到嵌入式编程,使用如C或汇编语言编写代码,实现小车的控制逻辑。这包括初始化传感器和电机驱动、解析传感器数据、决策算法(如PID控制)以及PWM(脉宽调制)信号生成等。PWM是一种有效控制电机速度的方法,通过改变脉冲宽度来调整电机的平均电压,从而改变电机转速。
在实际的设计与实施过程中,还需考虑小车的机械结构设计,确保其稳定性与灵活性,同时也要考虑到重量、体积等因素,以满足比赛的规则要求。此外,抗干扰能力和故障处理机制也是设计中不可忽视的部分,以保证小车在复杂环境中也能稳定工作。
这个智能巡线小车项目涵盖了电子设计的多个方面,包括微控制器应用、传感器技术、电机控制、电源设计以及嵌入式软件开发等,对于参赛者来说,是一个全面检验和提升自身技能的好机会。
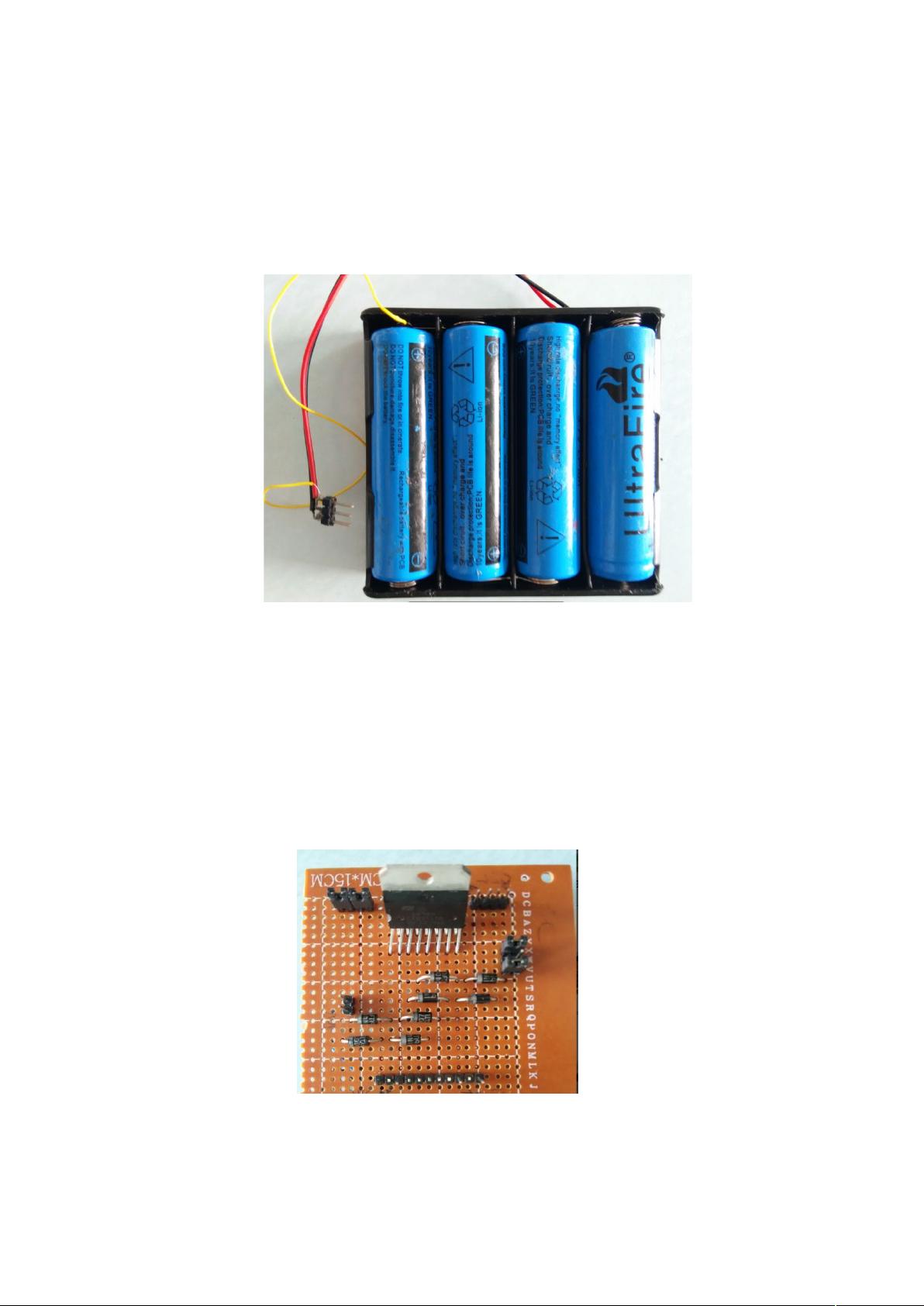
采用 4 节电池串联的电池组供电。电源输出端经过 7805 降压模块形成 5V
给单片机供电,通过单片机的 IO 口连接到 l298n 驱动模块的输入端上,然后输
出端直接连电机,这样输出的电压稳定,同时也减轻了小车的质量,使小车更
加灵活。单片机的供电电压也不会高,能保证单片机的安全性。
图 2 电池组实物图
1.2.3 电机驱动模块设计与实施
L298N 驱动
L298N 是 ST 生产的芯片,主要特点:工作电压高,最高工作电压可达到
46V,并且可以驱动两个电机,可以直接通过电源来调节电压;可以直接用单
片机的 I/O 口提供信号,而且电路简单,使用比较方便。可实现电机正反转及
调速。启动性能好,启动转矩大。工作电压可达到 36V,4A。可同时驱动两台
直流电机。 2
剩余33页未读,继续阅读
2025-01-09 上传
2025-01-09 上传
2025-01-09 上传
2025-01-10 上传
2025-01-09 上传
2025-01-09 上传
2025-01-09 上传
2025-01-09 上传

qq_29148639
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- kindergarten
- 基于VB实现ACCESS汽车租凭管理系统(论文+系统).rar
- 软件测试工程师面试题及答案(全)文档集
- 最好用的JAVA代码混淆工具proguard-7.0.0.zip
- mixlib-cli:用于创建命令行应用程序的混合-为参数说明和处理提供了简单的DSL
- Flutter_Localizations:一个示例flutter应用程序,演示了如何使用本地化来支持2种语言
- 自平衡智能小车第二版-电路方案
- zstack.zip
- 基于MATLAB的遗传算法工具箱(51个MATLAB工具+源代码).zip
- Weights-Initialization-in-Nueral-Networks:神经网络中的权重初始化技术
- 20200917-头豹研究院-汽车应用系列深度研究:2019年中国经营性汽车租赁行业应用概览.rar
- CICD_automation
- 变频器 SINAMICS G120D,配备控制单元 CU240D-2.zip
- 耶鲁大学人脸识别数据集
- sinatra-book:正式回购到sinatrasinatra-book教程+食谱
- DFRobot_DS323X
