利用PCL库进行激光雷达建模与C++路径规划
需积分: 0 114 浏览量
更新于2024-08-05
收藏 834KB PDF 举报
实验8-实验指导书1主要介绍了如何在C++编程环境下,结合PCL库(Point Cloud Library)进行无人机SLAM(Simultaneous Localization and Mapping,同步定位与建图)的基础实验。该实验的重点在于利用激光雷达(如Velodyne-VLP16)获取的三维环境信息来实现点云处理、地图构建和路径规划。
1. 实验目的:
- 学习和实践C++编程,特别是与PCL库的集成,掌握点云分析和基础地图构建技术。
- 使用PCL处理实时点云数据,进行障碍物检测和识别,以便进行简单的航迹规划,包括障碍物规避、路径优化和算法比较。
- 深入理解图论算法在路径规划中的应用,并通过C++代码实现这些算法。
2. 实验原理:
- 激光雷达探测原理:激光雷达基于雷达原理工作,发射激光脉冲并测量回波时间来计算目标距离。Velodyne-VLP16通过极坐标到直角坐标的转换,确定散射点的三维坐标(x, y, z)。
- 距离和角度分辨率:激光雷达的分辨率取决于脉冲宽度和控制电机的最小旋转角度,使得系统能够精细地捕捉空间中的散射点。
3. 实践步骤:
- 在Visual Studio环境中设置C++项目,创建名为PathCalculate_的头文件。
- 配置PCL库,确保其与项目兼容,并能有效处理点云数据。
- 编写代码以读取和解析激光雷达数据,将其转化为点云对象。
- 开发算法来分析点云,识别障碍物,构建环境模型。
- 设计路径搜索算法,考虑障碍物避免和路径优化,可能涉及到A*搜索、Dijkstra算法或RRT等。
- 运行和测试代码,验证算法性能和精度。
4. 技能提升:
- 这个实验将帮助学生提升C++编程能力,熟悉面向对象编程和数据结构在点云处理中的应用。
- 熟悉PCL库的功能,了解如何在实际项目中集成和优化其性能。
- 深入理解传感器数据处理、环境建模和路径规划的理论知识。
通过这个实验,参与者不仅将理论知识与实际操作相结合,还能够增强对无人机自主导航系统核心组件的理解,为进一步研究和开发更高级的无人机应用打下坚实基础。
3
分辨率以及俯仰维角分辨率(线数)。商用的激光雷达技术比较成熟,可以在一
定的探测范围内通过高重频脉冲获得较高的分辨率,最终将散射点的信息反映到
成像系统中,生成点云。
然而,激光雷达的高分辨特性也有其不足之处 – 即高分辨率势必会带来巨
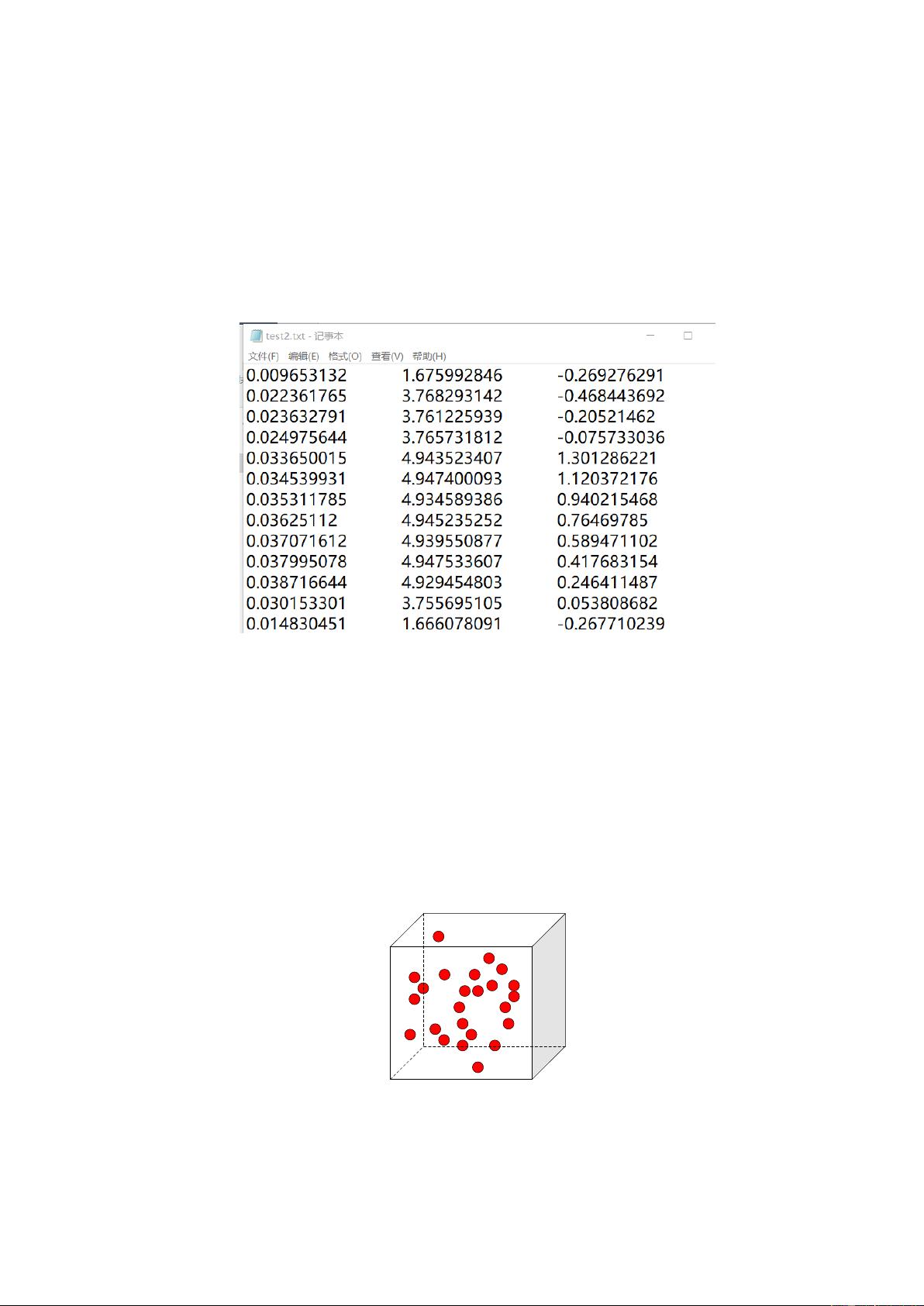
大的数据量和不必要的噪点。如下图所示为 12 米长,10 米宽,4 米高的某实验
室中由 16 线激光雷达在 10ms 内录取点云信息数据量大小。共 27028 个点,每
个点包括 xyz 信息,大小为 1MB.
若考虑无人机系统对于路径规划的实时性要求,在 10ms 内处理 1MB 的数
据则至少需要 100MBps 的带宽传输数据。此外,算法本身还具有一定的复杂度
和运行时间也需要考虑进来。受自重影响,芯片功耗限制要求也比较高,无人
机本身具有一定体积,安全飞行需要与障碍物保证一定距离……综上考虑,在
路径规划之前,有必要对环境模型进行离散化的建模。
一种比较简单的环境建模方法就是根据点云信息,将环境分成若干个正方
体作为网格单元。如果该网格单元中存在物体的散射点,整个立方体就视为障
碍点;反之,该立方体就是可以飞行的自由空间。基于立方体的环境建模方法
如下图所示。
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2011-01-09 上传
2014-10-09 上传
2013-03-16 上传
2023-06-28 上传
2022-08-08 上传
2022-08-03 上传

华亿
- 粉丝: 51
- 资源: 308
 我的内容管理
展开
我的内容管理
展开







最新资源
- TrebBrennan.github.io
- genetic-startups-web:代表初创企业生命的遗传算法(用Ruby on Rails + React编写)
- demo
- cmake-3.14.1-Linux-x86_64.tar.gz
- Pokemon Wallpaper HD Custom New Tab-crx插件
- spam-filter-with-naive-bayes:使用多名词朴素贝叶斯算法构建垃圾邮件SMS过滤器
- 招生信息网网站模版
- vegcart:具有提供商状态管理的Flutter演示应用程序。 包括多个主题选项
- CSharpOopsProject
- Bulletin_Board
- 20200928农业机械系列深度研究:2019年中国农机自动驾驶行业研究报告.rar
- CircleProgress:圆形动画progressbar,这里是github一个开源项目,代码down下拉,研究了一下,并做了详细的注释
- 节点后端
- mex_utils:MATLAB 的 mex 接口的 C++ 包装器,旨在
- 20210311电子行业汽车电子专题:汽车芯片缺货缘由及关注重点.rar
- 篮球 热门运动 高清壁纸 新标签页 主题-crx插件
