多阶段决策优化:动态规划详解与最短路径问题实例
需积分: 10 162 浏览量
更新于2024-07-25
收藏 764KB DOC 举报
动态规划是一种解决多阶段决策最优化问题的有效方法,它将复杂问题分解成一系列相互关联的子问题,并通过优化每个子问题的解来求得全局最优解。在经典算法教程中,我们通常会遇到这类问题,如最短路径问题,它涉及到在给定网络中找到从一个起点(如城市A)到另一个终点(如城市E)的最短路径。
在最短路径问题中,动态规划的关键在于分阶段分析。例如,对于从城市A到城市E,可以将其划分为多个阶段,每个阶段代表从一个节点到其相邻节点的移动。阶段变量k用来表示决策阶段,比如第一阶段是A到B的选择,第二阶段是B到C的选择,依此类推,直到到达E为止。在这个过程中,我们需要定义两个关键的概念:
1. 状态转移函数 (dk(xk, xk+1)):这个函数描述了在第k阶段从某个状态xk到下一个状态xk+1的路径距离,它是决定当前决策对后续路径影响的基础。
2. 价值函数 (Fk(xk)):Fk(xk)表示从第k阶段的xk到终点E的最短距离。动态规划的核心思想是利用已知阶段的价值来计算后续阶段的价值,即利用先前阶段的最优解来更新当前阶段的最优解。
在上述例题中,递归地进行计算是关键步骤。首先初始化阶段K=4,计算从各个起点到终点的直接距离。然后逐级向前推进,例如,K=3时,根据当前状态和所有可能的下一步,取最小值来更新F3的值。这个过程一直持续到K=1,当到达起点A时,由于没有下阶段,最短路径的总距离就是F1(A)。
最终结果表明,从A到E的最短路径为A->B2->C4->D3->E,总路径长度为13。这就是动态规划在实际问题中的应用实例,它展示了如何通过分阶段求解和存储中间结果来解决复杂的优化问题,避免重复计算,提高效率。动态规划在诸如背包问题、最长公共子序列、最值问题等领域都有着广泛的应用,是现代计算机科学中不可或缺的算法之一。
301
20-;-+-8
-./- ;,2028
42+0F/()8
0E
如果想知道选择了哪些物品,那么应将程序作些改动,具体就是对选中的物品做一标
记。见参考程序,其中的数据输入采用文件输入,输入文件为 bbinput.txt(第 1 行为背包
负重能力和物品种数,第 2 行为每种物品的价值,第三行为每种物品的重量)。
动态规划的正向思维法
正向思维法是指从初始状态或边界状态出发,利用某种规则不断到达新的状态,直到
问题目标状态的方法。动态规划的正向思维法,正是从已知最优值的初始状态或边界状态
开始,按照一定的次序遍历整个状态空间,递推出每个状态所对应问题的最优值。
提出动态规划的正向思维法的根本原因,是为了摆脱逆向思维法当中那种将大问题转化
为子问题的思维框框,提供一种新的思维方式。在正向思维法中,我们不再区分原问题和
子问题,将动态规划的过程看成是从状态到状态的转移。我们将所有的状态构造出一个状
态空间,并在状态空间中设想一个状态网络,若对两个状态 i,j,存在决策变量 di 使
t(i,di)=j,则向状态网络添加有向边。给定己知最优值的初始状态或边界状态,我们可以
沿着有向边推广到未知最优值的新状态,利用状态转移方程得到新状态的状态变量的最优
值。我们可以用这种方式遍历整个状态空间,得到每个状态的状态变量的最优值。
因为正向思维法中不再区分原问题、子问题、子子问题,所以我们不再按照问题被递归
调用求解的相反次序的方法确定状态最优值的计算次序。从上面我们知道可以按照状态的
拓扑序列来计算每个状态的最优值,于是我们用一个新的名词“阶段”来描述在状态空间遍
历的过程中,各个状态最优值的计算次序。我们将每个状态和一个阶段挂钩,前一个阶段
的状态先计算,后一个阶段的状态后计算。有的时候我们甚至将一组状态和一个阶段挂钩,
前一个阶段的那组状态先计算,后一个阶段的那组状态后计算,而在同一个阶段内,那些
状态的计算次序可以是任意的。
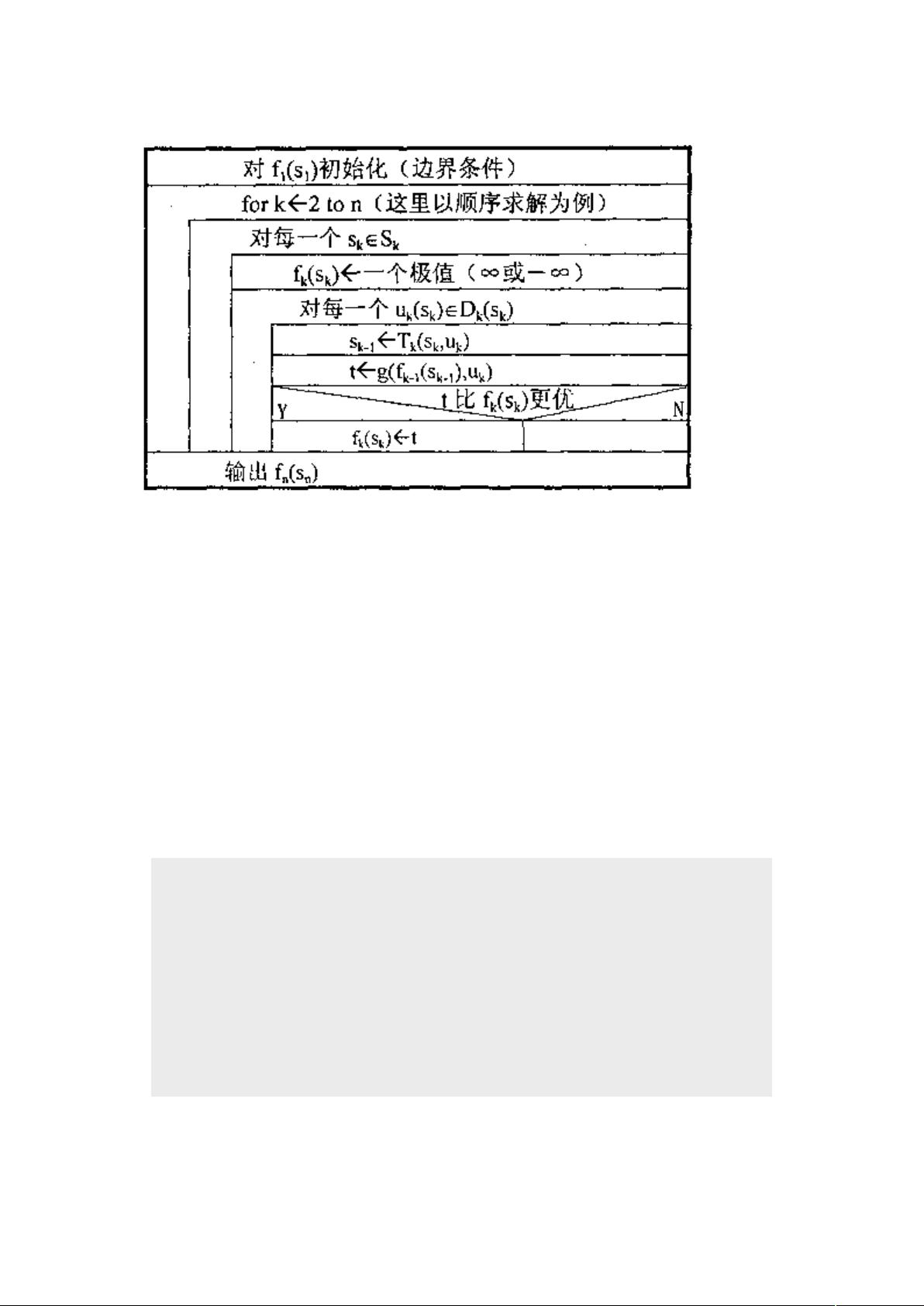
动态规划的正向思维法的要点可归纳为以下三个步骤:
(1)构造状态网络;
(2)根据状态转移关系和状态转移方程建立最优值的递推计算式:
(3)按阶段的先后次序计算每个状态的最优值。
在下一节“最短路问题”当中,我们将结合最短路问题来示范动态规划的正向思维法。
动态规划的正向思维法带给我们什么启示呢?动态规划需要按阶段遍历整个状态空间,
因此动态规划的效率取决于状态空间的大小和计算每个状态最优值的开销:如果状态空间
的大小是多项式的,那么应用动态规划的算法就是多项式时间的;如果状态空间的大小是
指数的,那么应用动态规划的算法也是指数时间的。因此,找一个好的状态划分对动态规
划的效率是至关重要的。
将这个结论应用到逆向思维上,我们得出如下结果:一个问题的最优子结构常常暗示了
动态规划的状态空间。典型的情况是,某一个特定问题可有几类“自然”的子问题,不同的

剩余63页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-05-30 上传
2021-01-06 上传
2023-07-31 上传
2013-04-25 上传
2009-11-08 上传
2010-07-27 上传

端锦
- 粉丝: 1
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- ansible:遇到了无法完全消除的麻烦,可以通过SSH-opdrachten自动化。 zwang的自动执行工具。有关自动化的相关信息,请与相关人员联系
- linux项目工程资料-水星UD6S Linux驱动,适配了5.15.zip
- Seeed_Arduino_UltrathinLEDMatrix-master_2.7z
- bosh-utils:从bosh-agent和bosh-init提取的通用软件包
- command-center:〜.emacs.d和〜.bashrc等
- 智慧社区,采用Vue前端工程,更新node-modules后即可运行
- AnimalHeritage.java:Java继承的简单练习
- capstone
- 分布式电源接入对配电网影响分析
- FEUP-SDIS:在SDIS中开发的作品
- 复制时钟组件及时钟周期事件
- COGNIXIA_PYTHON:Cognixia Python JUMP培训
- Konsole Invaders-开源
- sqlalchemy-challenge
- money-manager:资金管理器是一个使用JavaScript,React,Node.js,Express.js构建的预算网络应用程序,可让您管理多个银行帐户并跟踪支出。该项目仍在建设中,尚未托管。该网站具有完全的移动响应能力。通过Express-Session启用会话。 Redis用于缓存。通过b-crypt和其他措施来实现安全性。我将在仪表板上工作,以尽快包含预算数据的图形和图表,并且应该在不久的将来托管该项目
- 易语言-Ring3进程内核查看,参照xuetr部分功能
