SIFT算法:特征提取与应用解析
需积分: 9 160 浏览量
更新于2024-07-23
1
收藏 2.9MB PDF 举报
"本文主要介绍了SIFT算法,包括它的概念、实现细节、应用领域以及相关的扩展和改进。SIFT,即尺度不变特征变换,是由David G. Lowe教授于1999年提出的,旨在解决图像在不同尺度、旋转、光照和位姿变化下的匹配问题。该算法能将图像转换为一组具有平移、缩放、旋转不变性的局部特征向量,对于光照变化和几何变换有较强的鲁棒性。"
SIFT算法详解:
1. SIFT算法的提出背景:传统图像匹配方法通常直接基于角点或边缘进行,但这些方法对环境变化的适应性较弱。SIFT算法的出现旨在克服这些问题,提供一种能够在各种条件下稳定识别目标的特征提取方法。
2. SIFT的主要步骤:
- **尺度空间极值检测**:通过高斯差分金字塔构建尺度空间,寻找尺度不变的关键点。
- **关键点定位**:对找到的候选点进行精确的二次微分检测,确定关键点的位置和尺度。
- **关键点方向分配**:为每个关键点分配一个主方向,使其对旋转具有不变性。
- **关键点描述符生成**:在关键点周围采样邻域,生成一个描述符向量,用于后续的匹配。
- **描述符降维和归一化**:为了提高匹配效率和鲁棒性,对描述符进行降维处理和L2范数归一化。
3. SIFT算法的特点:
- **尺度不变性**:SIFT特征可以在不同的尺度下保持一致,适用于图像缩放场景。
- **旋转不变性**:通过对关键点分配方向,SIFT特征可以应对图像的旋转变化。
- **光照不变性**:SIFT描述符对光照强度的变化具有一定的抗干扰能力。
- **局部性**:SIFT特征描述的是图像的局部区域,不受全局图像变化的影响。
- **稳定性**:即使在复杂的环境变化下,SIFT特征仍能保持较好的稳定性。
4. SIFT算法的应用领域:
- **图像匹配**:SIFT广泛用于图像间的对应点搜索,例如在全景图像拼接、3D重建等领域。
- **物体识别**:在物体识别和检测任务中,SIFT可以帮助定位和识别目标物体。
- **视频分析**:在视频处理中,SIFT可用来追踪物体或进行帧间匹配。
- **机器人视觉**:在机器人导航和环境感知中,SIFT有助于建立可靠的地标识别。
5. SIFT算法的扩展与改进:
- **SURF**:加速稳健特征,是SIFT的快速版本,减少了计算复杂度。
- **ORB**:Oriented FAST and Rotated BRIEF,结合了FAST关键点检测和BRIEF描述符,更快速且鲁棒。
- **AKAZE**:快速且准确的尺度不变特征检测器,提高了SIFT的计算效率。
- **SIFT的深度学习替代**:随着深度学习的发展,如CNN-based特征描述符(如VGG,ResNet的池化层特征)逐渐成为主流,但SIFT仍然在某些低计算资源场景下具有价值。
SIFT算法在图像处理领域具有深远影响,虽然现代技术如深度学习不断涌现,但SIFT的基础理论和实践价值仍然不可忽视,尤其是在需要离线特征提取和低计算资源的场景下。
Scale Invariant Feature Transform
SIFT
2012/3/27 12
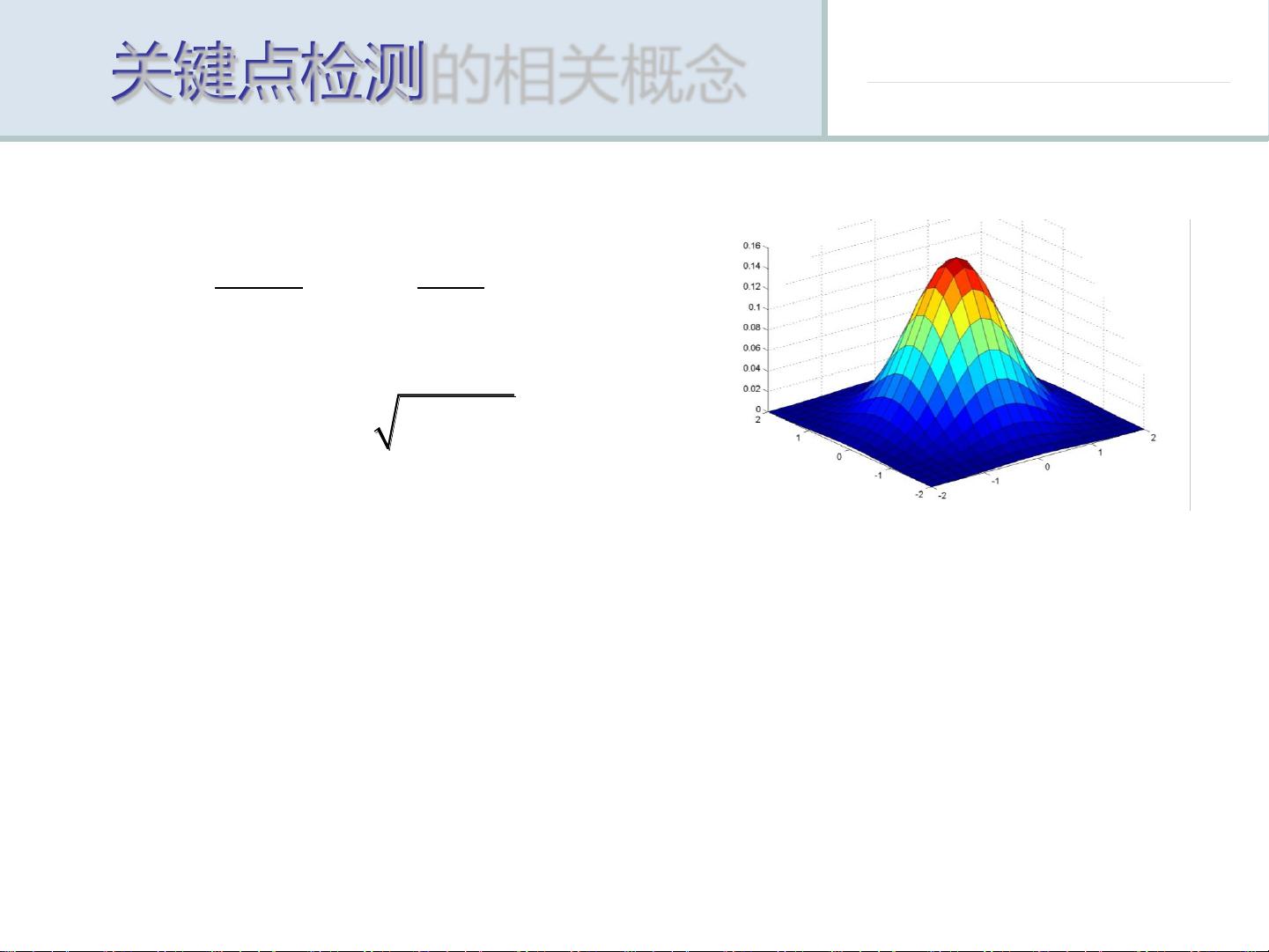
根据文献《Scale-space theory: A basic tool for analysing
structures at different scales》我们可知,高斯核是唯一可以产生
多尺度空间的核,一个图像的尺度空间,L(x,y,σ) ,定义为原始图像
I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算。
关键点检测
, , , , * ,L x y G x y I x y
22
22
1 ( ) ( )
, , exp
22
ii
ii
x x y y
G x y
高斯函数
尺度是自然存在的,不是人为创造的!高斯卷
积只是表现尺度空间的一种形式…
关键点检测的相关概念

剩余68页未读,继续阅读
2022-09-24 上传
2019-06-25 上传
2021-10-02 上传


青松2
- 粉丝: 939
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- 火炬连体网络在MNIST的2D嵌入实现示例
- Angular插件增强Application Insights JavaScript SDK功能
- 实时三维重建:InfiniTAM的ros驱动应用
- Spring与Mybatis整合的配置与实践
- Vozy前端技术测试深入体验与模板参考
- React应用实现语音转文字功能介绍
- PHPMailer-6.6.4: PHP邮件收发类库的详细介绍
- Felineboard:为猫主人设计的交互式仪表板
- PGRFileManager:功能强大的开源Ajax文件管理器
- Pytest-Html定制测试报告与源代码封装教程
- Angular开发与部署指南:从创建到测试
- BASIC-BINARY-IPC系统:进程间通信的非阻塞接口
- LTK3D: Common Lisp中的基础3D图形实现
- Timer-Counter-Lister:官方源代码及更新发布
- Galaxia REST API:面向地球问题的解决方案
- Node.js模块:随机动物实例教程与源码解析
