Yolo算法全解析:从Yolov1到Yolov6的演进
版权申诉
35 浏览量
更新于2024-06-19
收藏 10.24MB PPTX 举报
"这篇资源是关于Yolo算法的全面概述,涵盖了从最初的Yolov1到最新的Yolov6的迭代发展历程。通过PPT的形式,旨在帮助读者理解这一系列目标检测算法的核心思想、网络结构以及各代之间的改进。"
Yolo(You Only Look Once)是一种快速且高效的目标检测算法,其设计思路是摒弃传统的两阶段检测方法,改为一阶段直接预测目标边界框,从而大大提高了检测速度。Yolo算法自2016年首次提出以来,经过多次迭代,不断优化性能和精度。
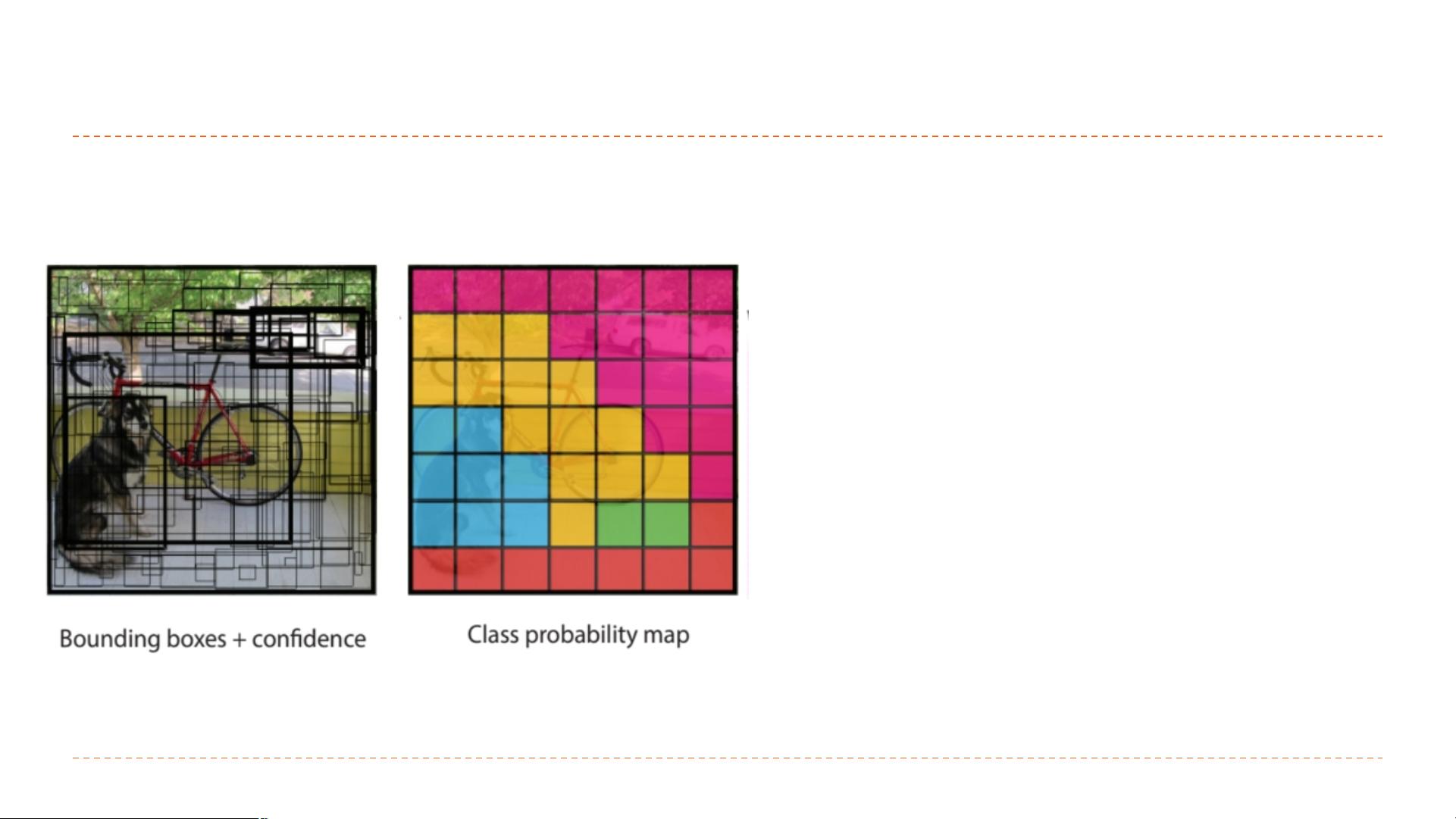
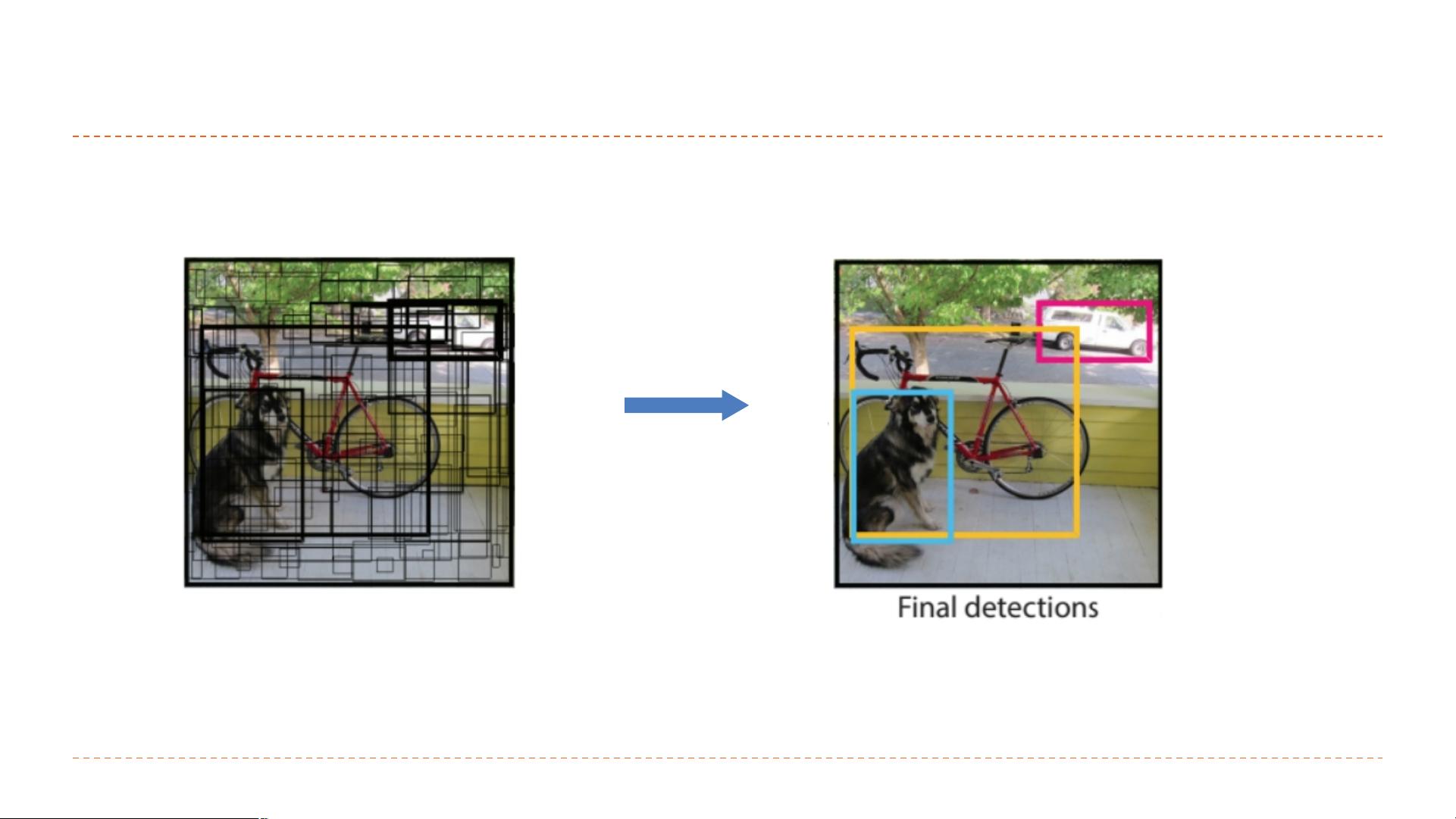
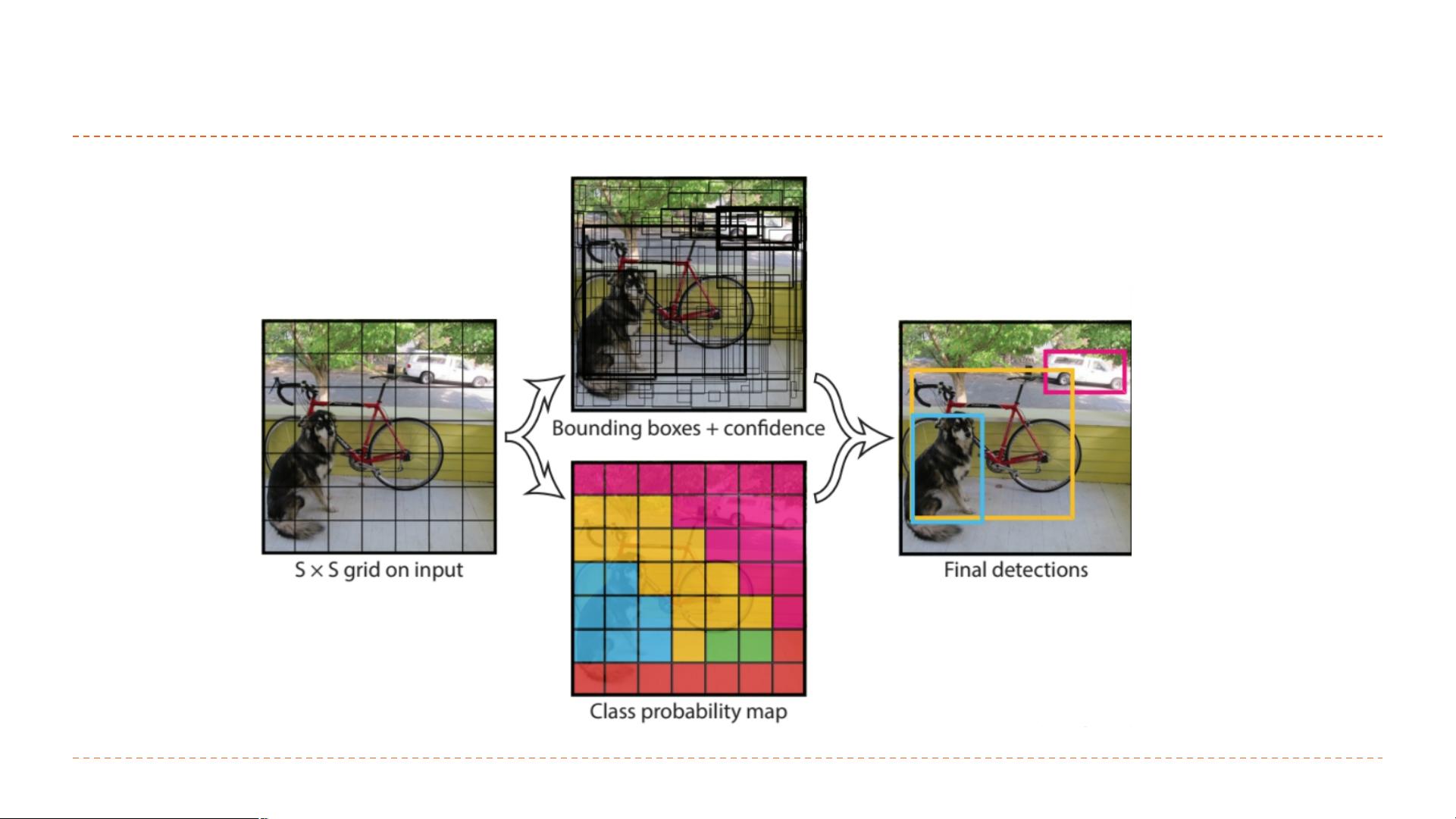
**Yolov1** 是一阶段目标检测的开创者,它的主要思想是将输入图像划分为S*S的网格,每个网格负责预测B个边界框及其对应的置信度。每个边界框包含5个预测值:中心坐标(x, y),宽度(w)和高度(h),以及与真实框的IoU(Intersection over Union)的置信度。Yolov1使用LeakyReLU作为激活函数,尽管速度快,但对小目标检测和精度有所欠缺。
**Yolov2** 在Yolov1的基础上进行了改进,主要目的是提高精度和准确性。它引入了残差网络结构Darknet-19,以及多尺度训练,提升了对小目标的检测能力。同时,Yolov2使用了更平滑的激活函数BN(Batch Normalization)和更高分辨率的预测,使得模型更加稳定。
**Yolov3** 引入了Darknet-53作为主干网络,增强了特征提取能力。此外,它采用了多尺度特征和9种预设的先验框,进一步提高了对不同大小目标的检测效果。Yolov3还引入了上采样技术来融合低层和高层特征,增强了定位的准确性。
**Yolov4** 在Yolov3基础上进行了大量改进,如采用主干网络CSPDarknet53,引入Mish激活函数替代ReLU,以及各种数据增强和优化技术,如CutMix和Mosaic,显著提升了模型的检测性能和泛化能力。
**Yolov5** 是一个结构更加灵活的版本,使用了不同的主干网络架构,如EfficientNet和HRNet,并提出了四种不同规模的模型版本,满足不同计算资源的需求。Yolov5还引入了批标准化层的改进,以及自适应锚点机制,优化了训练流程。
**YoloX** 进一步优化了解耦检测头的设计,分离了分类和定位任务,同时提供了anchor-based和anchor-free两种检测方式,提高了检测速度和精度。主干网络也进行了升级,增强了模型的表示能力。
**Yolov6** 最新版本的Yolo继续对解耦检测头进行改进,可能还包括其他创新,以提升模型的实时性和准确性。
Yolo系列算法的进化历程展示了目标检测领域对速度与精度之间平衡的持续探索,每一版的更新都在前作的基础上力求更好的性能表现。这些算法不仅在学术界受到广泛关注,也在实际应用中发挥了重要作用,如自动驾驶、视频监控等领域。
《神经网络与深度学习》
9
YOLOv1
1.主要思想:
2.每个网格预测B个边界框和它们的置
信度,置信度是预测框和真实物体IOU
和网格是否包含物体01值之积。
3.每个边界框都包含5个预测值,
x,y,w,h,confidence,分别代表中心坐标,
宽高和IOU值,这里的坐标是相对于网格
左上角的偏移量,宽高是相对于整幅图像
的占比。
剩余51页未读,继续阅读
2023-05-30 上传
2024-06-04 上传
2023-11-01 上传
点击了解资源详情
点击了解资源详情
2023-08-09 上传
2023-04-10 上传
2023-06-21 上传


手把手教你学AI
- 粉丝: 9108
- 资源: 4678
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
