设计QoS支持的移动数据渡船控制框架:Switch-and-Navigate应对延迟约束
需积分: 12 169 浏览量
更新于2024-09-13
1
收藏 381KB PDF 举报
"Switch-and-Navigate: Controlling Data Ferry" 是一项针对移动数据传输问题的研究,主要关注在网络高度分割、节点间连接不稳定的环境下,如何有效地控制数据穿梭器(data ferry)进行消息传递。传统的工作往往假设数据穿梭器有完整的观察信息,并且通信质量没有明确的服务水平协议(QoS)要求。然而,这个研究旨在设计一个支持QoS的解决方案,处理部分观测和有限的消息延迟。
研究者构建了一个名为Switch-and-Navigate (SAN) 的综合框架,它是一个层次化的策略,分为全局开关策略和局部导航策略。全球开关策略负责决定最优的访问领域,而局部导航策略则在每个领域内寻找最佳节点。整个系统的设计考虑到了节点的马尔可夫移动特性,将问题转化为部分可观测马尔可夫决策过程(Partially Observable Markov Decision Processes, POMDPs),目标是最大化所有领域的折扣有效吞吐量。
由于POMDP的最优解在理论上是PSPACE-hard问题,解决起来非常复杂,因此研究者开发了启发式策略和近似算法来提高计算效率。这些方法旨在克服观测不完全和延迟限制,提高系统的灵活性和性能。通过模拟实验,研究结果显示,提出的策略相比于预设路线的方法,能够显著提升数据穿梭器的性能和通信质量。
总结来说,Switch-and-Navigate不仅解决了数据穿梭器控制中的观察不确定性,还引入了QoS约束,从而在复杂的网络环境中提高了数据传输的效率和可靠性。这对于分布式网络管理和优化通信服务质量具有重要的实践意义。
Switch-and-Navigate: Controlling Data Ferry
Mobility under Bounded Message Delays
Liang Ma
†
, Ting He
‡
, Ananthram Swami
§
, Kang-won Lee
‡
and Kin K. Leung
†
†
Imperial College, London, UK
‡
IBM T. J. Watson Research Center, Hawthorne, NY, USA
§
Army Research Laboratory, Adelphi, MD, USA
†
{l.ma10, kin.leung}@imperial.ac.uk,
‡
{the, kangwon}@us.ibm.com,
§
ananthram.swami@us.army.mil
Abstract—We consider the problem of controlling mobile
data ferries for message delivery among disconnected, scattered
domains in a highly partitioned network. Existing work on
data ferry control mostly focuses on predetermined ferry routes,
assuming full observations at the ferry and no explicit Quality
of Service (QoS) constraints on the resulting communications.
In this paper, we aim at designing a QoS-enabled ferry control
solution, which handles both partial observations and bounded
message delays. To this end, we extend our previous work on
data ferry control with partial observations into a comprehensive
hierarchical framework called Switch-and-Navigate (SAN), which
consists of a global switch policy for determining the best domain
to visit and a local navigation policy per domain for searching
for nodes within individual domains. Under the assumption of
Markovian node mobility, both the global and the local control
problems are formulated as Partially Observable Markov Deci-
sion Processes (POMDPs) to maximize the discounted effective
throughput over all domains. Due to the fact that the optimal so-
lution to POMDP is PSPACE-hard, we develop heuristic policies
and further approximations for efficient computation. Simulation
results show that the proposed policies can significantly improve
the performance over predetermined alternatives.
I. INTRODUCTION
The demanding requirements of mobile ubiquitous com-
munications have promoted the development of Highly Par-
titioned Mobile Ad Hoc Networks (HP-MANET) in which
the network, self-organized without the aid of any established
infrastructures, is partitioned into several permanently discon-
nected autonomous domains due to physical obstacles, limited
radio transmission range, severe environmental conditions, or
simply security reasons. Applications of such networks can be
found in many challenged environments, such as battlefield
operations and disaster relief in large areas. Existing research
on Delay/Disruption-Tolerant Networking (DTN) (e.g., [1])
has focused on intermittently partitioned networks, assuming
the disconnected links will be reconnected or new routes
can be discovered, which makes the solutions inapplicable to
permanently partitioned networks. In these networks, to bridge
communications between disconnected domains, designated
communication nodes called data ferries have been proposed
to serve as a carrier to deliver messages from one domain to
another. Programmed to move in a predetermined or dynamic
pattern, data ferries are capable of self-navigating within
and between domains to collect and deliver messages upon
contacting regular nodes. Therefore, proper mobility control is
Research was sponsored by the U.S. Army Research Laboratory and the
U.K. Ministry of Defence and was accomplished under Agreement Number
W911NF-06-3-0001. The views and conclusions contained in this document
are those of the authors and should not be interpreted as representing the
official policies, either expressed or implied, of the U.S. Army Research
Laboratory, the U.S. Government, the U.K. Ministry of Defence or the U.K.
Government. The U.S. and U.K. Governments are authorized to reproduce and
distribute reprints for Government purposes notwithstanding any copyright
notation hereon.
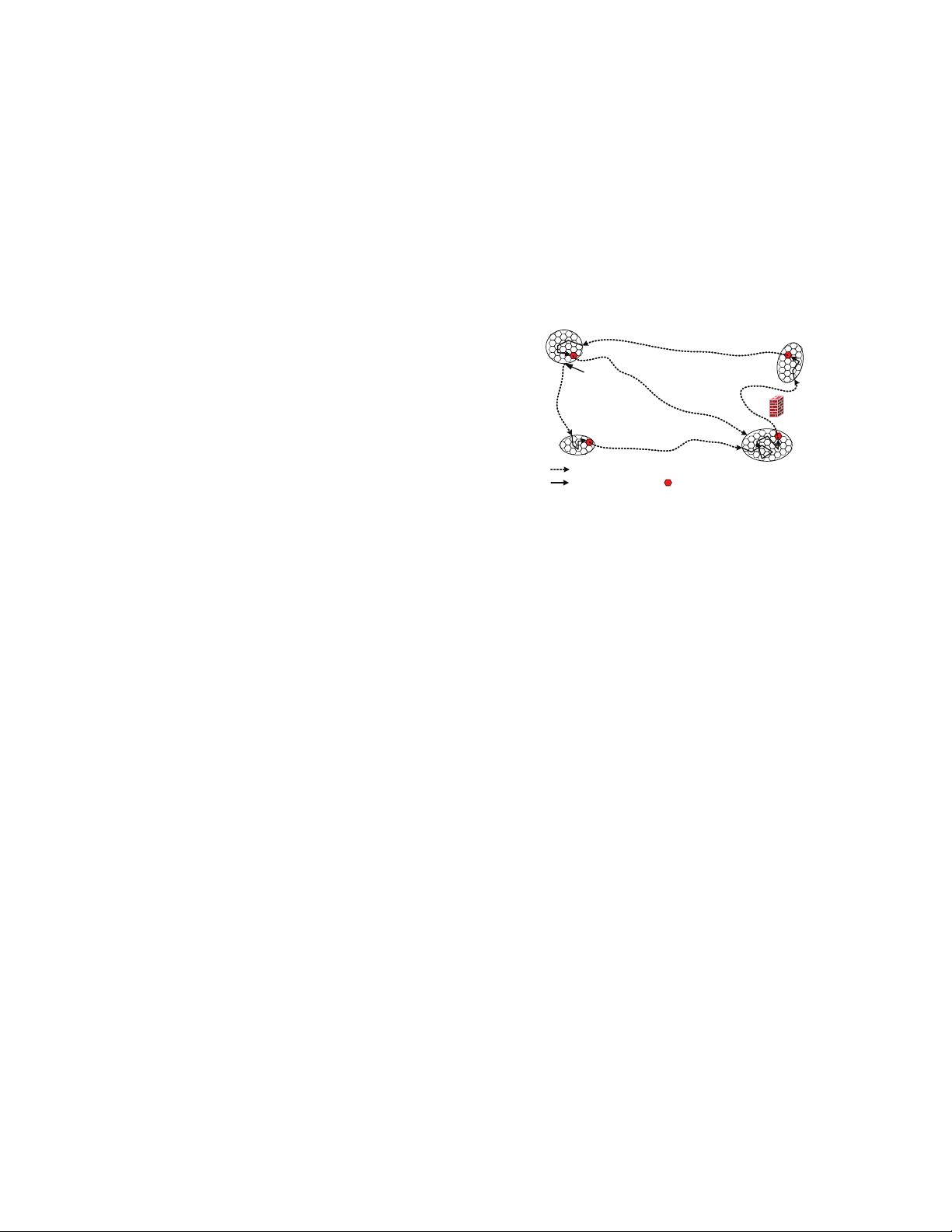
Start
Point
D
1
D
2
D
3
D
4
d
14
d
13
d
21
d
43
d
32
contact occurs in a domain
switch from one domain to another
local navigation
obstacle
Fig. 1. Example of Switch-and-Navigate: It follows a Switch-Search-Load-
Carry-and-Switch cycle
needed for data ferries to operate efficiently. A major challenge
in applying data ferries to military networks is that military
units exhibit high mobility, making it difficult to maintain
accurate node information at the data ferry. Moreover, unlike
traditional DTN, messages in military operations usually have
a finite lifetime, which must be considered in data ferry
control. In this paper, we aim to address these challenges by
designing control policies under finite delay constraints, with
the goal of optimizing the effective throughput in the network.
A. Related Work
Most existing work on data ferry control have concentrated
on the stationary or fully observable scenarios, where non-
ferry nodes are either stationary or always report their po-
sitions when moving. Focusing on the case of intra-domain
ferry control, algorithms and prototypes for mobile elements
scheduling were proposed in [2, 3]. Solutions in [4, 5] utilized
a mobile node to move randomly within a stationary sparse
network to deliver data opportunistically. Without requiring
global knowledge, authors of [6, 7] took advantage of non-
randomness of node movements to design proactive control
policies. Their solutions, however, require long-range radio
communications and the ability to change (non-ferry) node
trajectories, which are not feasible in many applications. The
authors of [8, 9] extended the Traveling Salesman Problem
(TSP) to reduce the delivery delay, but ignored the fact that
buffers in mobile nodes have a diverse collection of mes-
sages with non-identical residual lifetimes. A comprehensive
framework for dynamic ferry control was introduced in [10];
however, it assumed unit traveling time between any two
domains and unbounded message delays.
B. Summary of Contributions
In this paper, we address the problem of ferry mobility
control under partial observations and finite delay constraints.
Assuming Markovian node mobility in each domain, we
borrow the control framework of Partially Observable Markov
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
236 浏览量
2021-05-10 上传
269 浏览量
2021-06-05 上传
2021-04-29 上传
2021-03-04 上传
171 浏览量

ybcup
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- ReactJS实现的COVID-19追踪器:实时数据与趋势分析
- spring boot+mybatis开发的全栈个人博客系统
- 掌握LED灯自动闪烁实验教程与源代码分享
- 易语言高级表格库2.8#0版eGrid.fne更新与特性
- CSS-Spinner:纯CSS实现的12款优雅加载动画
- Go语言实现的fullcycle2持续集成教程
- Python代码库:辐射传热过程的实现与模拟
- 利用jQuery实现表格排序功能的方法
- 单相异步电动机FCMDL模型开发与MATLAB实现
- 易语言表格支持库2.8#0版发布:兼容性修正与功能增强
- pgRouting方向API实现:Node.js与Express的完整应用
- PCHunter_32X64_v1.57:增强版安全辅助工具发布
- 易语言客户管理模块功能与应用
- 实现无限滚动页面:使用Ajax和Infinite Ajax Scroll库
- JavaScript实现的供应链任务管理系统
- 探索六种DCT图像融合技术在Matlab开发中的应用
